工业机器人在自动化生产线分拣站的应用要素探索
时间:2023-05-28 22:35:06 来源:雅意学习网 本文已影响 人 
曲翠翠
浙江省医疗器械检验研究院,浙江杭州,310000
现阶段,工业机器人已经被广泛地应用在焊接、喷涂、搬运(码垛)以及装配等领域。在没有引入机器人之前,分拣流水线上的产品主要由人工来码放,在企业业务量不断增加的背景下,在分拣活动中若依旧采用传统的人工码放方式,不仅会降低工作效率,而且还会增加人工成本,影响到企业的经济效益。将工业机器人引入到自动化生产线分拣站工作活动中,不仅可以减少产品的生产成本,而且能够提升分拣站生产效率,为企业创造出更多的经济效益。
在工业机器人运动学分析活动中,需要依托欧式空间来搭建笛卡尔右手坐标系(下简称D-H坐标系),在坐标系的建设中应注意以下内容。
建立工业机器人每个杆件相对应的D-H坐标系(如图1所示),以此来描述工业机器人在运行时的三维运动,为了便于对各杆件运行状态进行分析,也会将相邻杆件坐标系关联在一起,建立系统的D-H坐标系。

图1 连杆杆件D-H坐标系示意图
每一个单独的坐标系都会进行命名,而且为了准确分析工业机器人目前的工作状态,也会在体系中添加固定参照物。一般情况下,用于分拣的工业机器人底座是处于固定的状态,因此会围绕基座建立基坐标系。
确定杆件的工作参数,以图1为例,其包含的参数及含义如下:①杆件的移动长度ai,表示杆件沿着Xi方向上,从Zi移动到Zi+1位置的距离;
②杆件的移动长度αi,表示杆件沿着Xi方向上,从Zi移动到Zi+1位置所转动的角度;
③杆件偏移的距离di,表示从Zi到Xi之间的距离;
④杆件关节位置的转动角度θi,表示杆件围绕Zi,从Xi-1到Xi所需要旋转的角度。基于这些参数可以对工业机器人整个工作过程进行量化描述。
如图2所示,工业机器人工作车间,共设有两条传送带和两个码垛台,其具体的工作流程如下。①在1号传送带的供料进入光电传感器1感知范围内之后,此时光电传感器会将检测信号传输给控制系统(PLC程序),在控制系统完成信息处理后向工业机器人下达工作指令;
②工业机器人根据接收到的指令,移动机械臂对1号传输带上的供料进行夹取,旋转机身将夹取的供料转移到码垛台1上方,根据既定的摆放程序,摆放到码垛台目前空缺的位置;
③此时系统码垛台1的计数“+1”,在达到预设数值后,此时传输带1上的指示系统会显示绿灯,提示该码垛台已经完成堆放任务,需要进行码垛盘的更换。自动化生产线中达标的码垛盘会自动转移到下一作业区域,同时也会更换新的码垛盘;
④系统检测到新码垛盘后,计数会清零,开始下一个循环操作过程;
⑤若传送带同时传来供料,那么系统会根据程序接收的先后顺序依次进行夹取,为避免堆积,传送带也会放慢运行速度,等待供料成功转移后,恢复正常速度的运输状态。
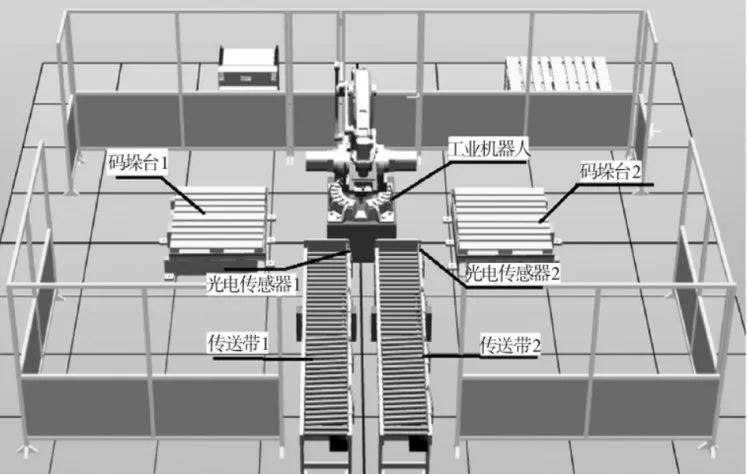
图2 工业机器人工作车间仿真示意图
3.1 码垛系统
码垛系统作为自动化生产线分拣站上的基础系统,其主要由以下内容构成。
(1)传送带,其在工作时的主要作用是将供料从某一位置转移到指定位置,其构造相对简单,主要由以下系统构成:①驱动装置,是确保传送带可以稳定运行的动力源,其主要是由电动机、减速器等设备组成;
②传动装置,是供料顺利传动到指定位置的重要载体,主要有输送带、托辊、滚筒等设备构成;
③张紧装置,作用是灵活调整传送带的松紧状态,以确保供料可以稳定传输到指定位置;
④变频装置,与光电传感器、PLC程序组成联动装置,用来控制传送带运行速度,避免供料堆积问题。
(2)工业机器人,根据生产性质、生产内容的不同,选择相应载重能力、位移能力、臂展能力、定位精度、转向能力、高度调节能力的工业机器人,确保码垛活动的有序进行。
(3)光电传感器,是利用光电元件制作的检测元件,会将其安装在传送带的起始位置和接近尾部的位置,实现对供料位置的快速定位,便于工业机器人执行相关操作。
3.2 电气系统
在工业机器人的工作中,主要以电力作为主要的驱动力,因此为确保工业机器人工作状态的稳定性,需做好电气系统的设计工作。通常情况下设计中会设计一个集成化程度较高的电控箱,该电控箱会由一个或多个开关构成,搭配着相应的控制系统、保护装置,与外部机械设施共同组成了整体运营系统。在电气系统的具体应用中,包含了以下内容:①可编辑逻辑控制器(PLC系统),用于动态控制整个系统的运行状态,下文中会进行详述;
②漏电开关与熔断器,在电气系统运行时出现漏电问题时,此时漏电开关打开,相关联的熔断器断路,以保护系统正常的运行状态;
③电源,主电源是工业用电提供的交流电或直流电,备用电源为UPS电源,在出现突发断电问题时可以在某个时间段内提供电力供给,维持设备正常的工作状态;
④其他配件,如中间继电器、连接线路、保护器等。
3.3 控制系统
3.3.1 PLC控制程序
在工业机器人工作中,会将PLC作为运行时的中央处理系统,其工作原理对操控界面上不同传感器传输的反馈信息进行整理,根据整理结果向工业机器人下达启动、夹取、转向等指令,属于整个控制系统中的核心组件。结合现场运行的实际需求,为了提高所设计程序的可理解性,会将整个系统的框架拆分成若干模块,包括机械臂动作模块、计算机视觉模块、转向模块等。在PLC程序的设计中包含了以下内容:①PLC和计算机视觉模块、机械臂动作模块关联在一起的系统程序,用于监督和调整工业机器人机械臂的操作过程;
②人机交互界面程序,作用是抽查工业机器人的码垛情况和夹具工作状态;
③运动程序,即供料从传送带开始传动,一直到完成码垛操作,对整个过程的执行顺序、时间顺序进行监督与动态调整,以此来提高系统运行状态的安全性与高效性。
3.3.2 I/O接线端口
在控制系统工作过程中,会借助I/O接线端口来完成信息交互,而工业机器人各模块(如传感器模块、电源模块等)也会依托各自I/O接线端口向控制系统传输相应信息,最后由控制系统对传输信息进行统一处理,为设备运行、维修等工作的展开提供良好保障。在系统的运行中,主要会依托传感器模块来采集系统的运行信息,在整个控制系统中可以将其看做是输入信号,而控制系统得到这些输入信号后,也会利用PLC程序对这些信号的逻辑关系进行判断,并利用计算公式对其进行运算处理,从而得到相应的输出信息,指挥工业机器人进行相应操作[1]。另外,在系统具体的运行中,也会基于通信电缆模板接口来确定字节地址与位地址,从而确定信号发出位置,帮助系统快速锁定系统故障位置,加快故障问题的检修效率。
3.4 视觉系统
3.4.1 视觉坐标系
在工业机器人工作过程中,所使用到的视觉坐标系如下。
(1)世界坐标系,该坐标系的主要作用是准确描述某物体在三维空间中的绝对位置,这也是确定工业机器人机械臂转矩、角度等参数的重要参考指标。
(2)相机坐标系,将工业相机的光心作为系统运行时的坐标原点,将相机的光轴作为x轴,建立三维坐标系,辅助工业机器人进一步确定工作坐标。
(3)像素坐标系,将光电传感器获取到的图像信息转换为平面图像,将图像左上角作为坐标系原点,建立平面坐标系,从而对目标像素点(供料位置)进行确定。
(4)图像坐标系,在获取到平面图像后,将图像中心作为原点来建立平面坐标系,从而确定目标图像点的相对位置。
上述四种坐标系都是工业机器人定位供料位置的常用坐标系,而四类坐标系也存在着 转换关系,即世界坐标系通过刚性转换可以得到相机坐标系,相机坐标系通过透射投影可以得到图像坐标系,而图像坐标系经过二次转换便可以得到像素坐标系。依托PLC控制系统可以对多坐标系内容进行整理与分析,以此来提高定位结果的准确性[2]。
3.4.2 手眼标定系统
在手眼标定系统的应用中,又可以细分为以下两种系统。①EIH系统,该系统会安装在机械手臂前端,是基于世界坐标系和相机坐标系之间的相对位置,来动态捕捉工业机器人的运动变化,在机器人手臂末端逐渐靠近物体时,此时物体的相对位置参数也会得到不断修正,而且依托于两种坐标系之间的相互关系,也可以更好地进行视觉控制,以得到准确的定位结果,顺利完成目标物体的夹取与转移。②ETH系统,该系统是将工业相机安装在工作区域的固定位置,以此来建立图像坐标系与像素坐标系,工业机器人机械手末端在运动时会看做是点靠近另一点(目标物体)的过程,根据两者相互间的位置关系,来准确完成相应的操作指令[3]。
3.5 安全系统
工业机器人在分拣活动中,确保其运行安全性也属于非常重要的工作内容。基于PLC程序工作特征,设计safety bus保护系统,搭配着相应的安全装置,能够对系统安全运行情况进行实时监督,在发现隐患问题后可以对接系统进行报警,同时根据安全威胁的影响情况,对设备采取继续运行、停机保护等操作,确保工业机器人运行过程的安全性。安全系统在应用中,声光报警模块是维持系统稳定运行的重要结构,在对该模块相关设备进行选择时,需考虑其时效性、准确性,以提高安全隐患发现的及时性,减少系统故障问题[4]。
3.6 人机交互系统
人机交互系统的设计是对工业机器人工作状态进行监督,这样也可以更加直观地发现系统运行问题,及时采取措施进行处理,以提高工业机器人工作效率与工作质量。在系统的具体应用中,会选择具有触摸功能的显示屏,而且对于整个系统中的不同控制单元,也会分配相应的触摸屏,基于I/O端口完成信息交互,形成良好的工业机器人工作联动系统。并且在各单元触摸屏上也会布置指示灯、操作按钮等结构,借助人为干预的方式来确保系统运行状态的稳定性,在出现一些故障问题后,这些故障的解决过程也会通过人机交互界面来展示故障位置、故障修复过程,从而为系统完善提供可靠的数据支持,提高工业机器人工作状态的稳定性[5]。
综上所述,工业机器人作为新技术不断拓展背景下的产物,在许多自动化生产线中都有着良好应用。自动化生产线具有较高的自动化水平,可以根据既定程序,有序完成自动化生产任务,具有生产效率高、成品质量高等优势。通过整理工业机器人在分拣站中的应用要点,一方面,可以提高产品生产效率,提升产品生产质量;
另一方面,能够提高工业机器人在分拣活动中工作状态的稳定性与安全性,以此来确保产品的合格率,为生产体系优化提供数据参考。







