静脉识别系统成像三维优化设计*
时间:2022-12-04 10:25:03 来源:雅意学习网 本文已影响 人 
罗小燕, 谢 云
(1.江西理工大学 机电工程学院,江西 赣州 341000; 2.江西省矿冶机电工程研究中心,江西 赣州 341000)
手背静脉识别技术是一种新兴的生物识别技术,具有安全性能高、稳定性好以及非接触式识别等优点[1]。手背静脉识别实现的第一步即为采集静脉图像,采集工作需要在850 nm的光照环境下进行,所采集静脉图像的品质直接影响识别的准确率。在实际应用中,由于单个近红外发光二极管(LED)的照度不均匀,LED排列不规范,布局不合理,导致LED光源光照不均匀,采集的静脉图像存在曝光度不均匀、特征信息显示不充分等问题,不仅增大了后期图像处理的工作难度,还减少了所采集图像中包含的静脉特征,导致识别系统的识别效率及准确率降低。针对上述问题,需要对LED阵列进行优化,设计一种光照均匀度高的光源。
近年来,为提高适当距离处光源的均匀照度场,光源的二次光学设计得到相关研究人员的广泛关注,并取得不错的成就[2,3]。吴飞等人[4]建立光学模型,通过斯派罗法则>对LED的距离进行优化,确定最优距离,构建三角形光源阵列。王加文等人[5]构建均匀度评价函数,采用模拟退火算法对圆形以及4×4和5×5的矩形LED阵列进行优化,分别得到97 %,96 %和95 %的光照均匀度。何果等人[6]采用果蝇优化算法,分别对矩形和圆形LED阵列的三维坐标参数进行优化,通过TracePro进行仿真验证,分别得到97.4 %和96.0 %的光照均匀度。Wang J等人[7]建立环形光源的照度计算模型,从理论模型出发,得到检测平面与LED平面距离与照度均匀度之间的数学关系,并求出最优解,得到最佳均匀照度场。
本文建立光源照度模型,采用菌群算法针对LED阵列的坐标参数进行三维空间优化,得到最佳位置参数,最后通过TracePro光学软件进行仿真,并进行实验,将LED按优化所得位置排列,获取优化光源后的手背静脉图像。
静脉识别系统中,手背上光源分布的均匀性显得尤为重要。系统中采用的由多个LED组成的近红外光源在接收平面内产生的照度不均匀。导致采集的静脉图像出现下列两种缺陷:1)接收平面的竖直方向上光照不均匀,容易出现部分位置曝光过度,导致获取的静脉图像出现静脉显示不清晰的情况。如图1(a)所示,在竖直方向上,光照强度强的上半部分静脉未能显示。
2)在接收平面的横向方向上光照效果不均匀,容易出现阴影。如图1(b)所示静脉图像。在传统LED光源阵列的照射下,由于接收平面右半部分较左边部分光照弱,导致静脉图像右半边出现阴影,该部分的静脉未能展现,静脉的整体特征未能体现。

图1 不均匀光照下的静脉图像
后续的静脉识别过程中,静脉特征不能完全提取,容易出现识别错误,导致识别率降低。严重降低静脉识别系统的鲁棒性。通过建立光照模型建模,并进行优化,获取最佳三维坐标参数。
2.1 光学模型
针对单颗LED灯珠,将其近似为一个点光源,光线以灯珠芯片为中心,向四周均匀发散,理想的LED点光源的辐射照度满足余弦函数[8]
E(r,θ)=E0(r)cosmθ
(1)
式中θ为光线与光轴之间的夹角;
E(r,θ)为光轴辐照度;
m为光源辐射模式,由半功率角θ1/2处的光强决定(该参数由生产工艺决定)。m值与半角θ1/2的关系可由下式确定
(2)
对单个LED灯珠进行分析,将其放置于三维空间点A(X,Y,Z)处, 则在点B(x,y,z)处接收到由该LED灯珠产生的光强为
(3)
在三维空间中将n个LED灯珠进行排列,灯珠的位置参数设定为(Xi,Yi,Zi),考虑到由n个LED灯珠组成的光源是一种非相关光源,空间内某一点的照度为各灯珠在改点照度的线性叠加[9]。则在点B(x,y,z)处由n个LED灯珠产生的总光强为
E(xi,yi,zi)=
(4)
将接收平面近似均匀地分为n份,则平面上每份的平均光照强度为
(5)
为衡量某一平面上光照均匀度,定义光源的照度均匀度μ,μ为光源接收平面上各点照度的平均值与最大值之比
(6)
构建评价函数F对LED的位置参数进行优化,令
(7)
由式(7)可看出,评价函数的自变量为LED灯珠的位置参数,通过优化算法寻找某一特定坐标,使评价函数取得最小值,使静脉所接收的光照均匀度达到最高。针对评价函数的最小值寻找问题,常采用全局优化算法实现,如遗传算法、果蝇算法、模拟退火算法等[10~13]。本文拟采用菌群算法对LED光源的三维坐标参数进行优化。
2.2 优化算法模型
为实现LED阵列位置参数的三维优化,本文采用菌群优化算法进行优化。对LED位置参数寻优过程中,通过模拟菌群的趋向机制、聚群机制、繁殖机制以及迁徙机制[14,15],使代表LED的菌群在某一限制范围内不断搜索,向最优位置移动。其中,将LED位置参数(xi,yi,zi)设定为菌群的具体位置,以评价函数F作为优化指标。
优化过程中,第i个LED沿某个方向移动一步所产生的解可以表示为
(8)

采用菌群算法对LED阵列位置参数优化的具体步骤如下:
步骤1 初始化操作。将各LED灯珠看作单个细菌,据实际成像距离及面积确定其位置参数的上下限xmin,xmax,ymin,ymax,zmin,zmax。对LED的位置参数进行初始化方法如下
xi(0)=R(xmax-xmin)+xmin
(9)
yi(0)=R(ymax-ymin)+ymin
(10)
zi(0)=R(zmax-zmin)+zmin
(11)
式中xi(0),yi(0),zi(0)为LED的三维初始坐标,R为[0,1]之间的随机数,种群规模为s,i=1,2,…,s。
步骤2 趋向性操作。每个细菌进行一次趋向性位移后,计算新位置的评价函数,并与上一个位置的评价函数进行比较,若评价函数较上一位置小,则更新位置参数;
反之,则位置参数保持不变,记录新位置Ji(j,k,l)。
步骤3 繁殖操作。分别计算S个细菌在优化过程中各位置的评价函数值总和评价函数总和越大,方差越大,则细菌健康度越低,反之则越高。根据健康度对细菌顺序排列,淘汰后sr=s/2个相对不健康的细菌。
步骤4 迁徙操作。每个细菌i=1,2,…,s以一定概率迁徙到达新位置。
步骤5 根据方差值是否为最小以判定寻优是否接受。若结束,则返回最优解(xi,yi,zi);
反之,返回至步骤2继续寻优。
位置参数优化流程如图2所示,流程图中Ned,Nre,Nc分别表示迁徙、繁殖和趋向性的执行次数。

图2 菌群算法优化程序结构
本文实验选用的LED芯片尺寸为5 mm×5 mm×0.1 mm,波长为850 nm,每个芯片的轴线方向的光照强度为2 800 mcd,发光面出射光纤数为100 000条。据实际操作情况,在距离光源40 mm处放置一块半径为30 mm的接收板,模拟手背静脉光源接收面。本实验分别设计矩形和圆形LED阵列,对位置参数进行三维优化,并进行Tracepro仿真和实验。
3.1 圆形LED阵列优化结果
设计一组由8个LED芯片组成的圆形LED阵列,半径设置为20 mm,初始LED芯片位置坐标如表1所示。

表1 圆形三维LED阵列初始坐标参数
圆形LED阵列的光照强度为
E(x,y,z)=
(12)
式中N=8为LED芯片个数,n为第n颗LED,圆形LED阵列的初始半径设置为20 mm。
初始状态下,通过Tracepro光学仿真软件对光源照度进行分析,得到圆形LED阵列在接收平面的照度分布如图3所示 ,照度均匀度为75.6 %。

图3 未经优化的圆形阵列照度分布
采用菌群算法对光源位置参数进行优化,将光照强度式(5)代入评价函数,寻找评价函数的最小值,经优化后,得到LED阵列中各灯珠新的位置参数见表2所示。

表2 圆形三维LED阵列优化坐标参数
采用光学软件对优化结果进行仿真测试,测试结果显示,经三维优化后的圆形LED阵列在接收平面内的照度均匀度为88.58 %,相较于未优化的LED阵列,照度均匀度提高了12.98 %,照度分布如图4所示。

图4 优化后的圆形LED阵列照度分布
3.2 矩形LED阵列优化结果
将9只LED按矩形排列,相邻LED之间的二维距离相等,设定为20 mm,优化过程对LED的的三维坐标进行优化,矩形LED芯片初始位置坐标如表3所示。其光照强度为
(13)
式中N=9,为LED芯片个数,n为第n颗LED。
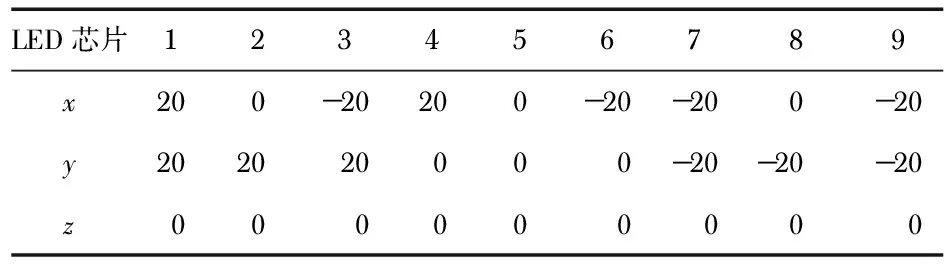
表3 矩形三维LED初始坐标参数
在初始状态下,通过Tracepro光学仿真软件对光源照度进行分析,得到矩形LED阵列在接收平面的照度分布如图5所示 ,照度均匀度为79.4 %。

图5 未经优化的矩形LED阵列照度分布
采用菌群算法对光源位置参数进行三维优化,将光照强度式(5)代入评价函数,寻找评价函数的最小值,经优化后,得到LED阵列中各灯珠新的位置参数见表4所示。
采用光学软件对优化结果进行仿真测试,仿真结果如图6所示,测试结果显示,经三维优化后的矩形LED阵列在接收平面内的照度均匀度为95.8 %,相较于未优化的LED阵列,照度均匀度提高了16.4 %。

表4 矩形三维LED阵列优化坐标参数

图6 优化后的矩形阵列下静脉成像
图7(a)为在优化光源下获取的手背静脉图像,相较于未优化光源下采集的静脉图像,图像的阴影部分明显减少,静脉信息与干扰信息之间的区分度极大提高。图7(b)为在优化光源下获取的手背静脉图像,相较于未优化光源下采集的静脉图像,图像曝光相对均匀,静脉显示较为清晰。

图7 优化后的静脉成像
本文针对静脉图像采集系统中光源照度均匀度较差的问题,分别以圆形LED阵列和矩形LED阵列为研究对象。基于单个LED芯片,对LED光源进行建模,结合菌群优化算法,对两种LED阵列进行三维优化,获取照度均匀度最佳时的LED芯片三维坐标参数。通过Tracepro光学仿真软件对MATLAB的优化结果进行验证,并进行实验。实验结果表明:三维优化后,圆形LED阵列的照度均匀度为88.58 %,较优化前提高了12.98 %;
矩形LED阵列照度均匀度为95.8 %,较优化前提高了16.4 %。获取的静脉图像品质得到极大提高,有效改善优化前静脉图像存在的曝光过度和阴影问题。







