基于整体式初始位移的柔性结构低频模态试验方法
时间:2023-06-30 18:35:02 来源:雅意学习网 本文已影响 人 
姜 东, 钱 慧, 朱 锐, 吴忆蒙, 胡嘉苗
(1. 南京林业大学 机械电子工程学院, 南京 210037; 2. 东南大学 空天机械动力学研究所, 南京 211189)
结构模态参数辨识是结构振动的核心内容之一,可以为结构动力学模型修正、损伤识别、故障诊断和健康监测等提供参考[1-4]。大型柔性结构如薄膜天线、太阳翼、桁架等广泛应用于航空航天领域,此类结构由于刚度较低以及形体庞大,具有低频模态的特点。采用传统测试方法进行大型柔性结构模态测量时,难以进行整体激振,导致测得的模态参数较难反映整体模态[5-7]。
激振方法选择是模态试验的关键,常见的激励方式有锤击激振法和激振器法。董袖青等[8]对某天线伺服机构进行模态试验,获得其模态参数,为天线伺服机构动态结构优化提供了参考;
黄春芳等[9]对复合材料桁架结构进行了模态试验;
Meguro等[10]对工程测试卫星(ETS-VIII)进行了地面动力学测试与分析;
Hunady等[11]利用锤击法结合3D-DIC技术对复合材料板的模态参数进行了确定;
Yin等[12]研究了考虑动态边界条件的柔性梁的模态参数,提出了一种无转动梁模型来描述转动柔性梁的动态边界条件;
王桂伦等[13]针对铰接式空间桁架结构,研究了悬挂和拾振条件对于模态试验的影响;
Zhu等[14-16]利用Sherman-Morrison-Woodbury理论消除了模态试验中附加传感器质量对试验结果的影响,且修正后的频响函数与目标值吻合较好。以上学者均采用锤击激振法进行模态试验,该方法属于单点激励频响函数测试技术,操作简单且容易实现[17],但是该方法,因此必须考虑另外的试验方法。激振器激励方法通过激振器、力传感器和激振杆对结构施加激励信号来获得结构的响应信号,激振力度和波形可控、激振稳定、信噪比高,常用的激励信号有正弦、随机和周期等形式[18]。张祎贝等[19]研究了薄膜结构在真空环境与空气环境中,激振器振幅对模态识别结果的影响;
余建新等[20]以铝合金薄壳截锥壳卫星适配器样机为研究对象,利用激振器法有效识别试验模态分析过程中的虚假模态和轴对称结构中的密集模态。然而,对于大型柔性结构,局部的激振难以激发整体的模态,因此需要研究针对大型柔性结构低频模态特点的激振方法。
对于航天结构的动力学参数辨识研究,早期多使用频域方法[21],例如频域分解法(frequency domain decomposition, FDD)[22],它很好地对峰值拾取法的一些缺陷进行了改进,对密集模态也有良好的识别效果。同时随着航天事业的发展,航天器的结构呈现出大柔性和低频的特点,在这种情况下,时域辨识方法逐渐成为了航天器动力学参数辨识中的主要方法。特征系统实现算法(eigensystem realization algorithm, ERA)[22-24]通过构造广义Hankel矩阵,利用奇异值分解技术,得到系统的最小实现,从而得到最小阶数的系统矩阵,以此为基础进一步识别系统的模态参数。于亮亮等[25]利用改进的ERA算法针对激励中含有谐波成分时完成了工况模态参数辨识;
章国稳等[26]将奇异值分解结合模态能量水平来剔除ERA算法识别结果中的虚假模态。朱锐等[27]提出一种基于奇异值百分比的模态定阶指标对ERA算法进行改进,改进后算法可以有效确定模态阶次、剔除虚假模态,且能更精确地识别阻尼参数。特征系统实现算法具有辨识精度高,抗噪能力强,便于确定模态阶次且识别速度较快,同时对具有低频模态特征的结构具有较强的辨识能力[28]。
本文提出了一种基于整体式初始位移的柔性结构的模态辨识方法,将整体式位移作为系统的激励,首先对结构施加整体式位移初始条件,测量结构的响应信号,最后利用测得的瞬态响应数据由特征系统实现算法辨识出结构的模态参数。通过总长为30 m的三棱柱型桁架的仿真算例,验证整体式位移激励方法的可行性,讨论噪声对辨识精度的影响;
通过带集中质量柔性梁试验,比较所提试验方法与传统锤击法所获得频响函数的准确性。
多自由度系统自由振动的控制方程为

(1)
式中:M为质量矩阵;
C为阻尼矩阵;
K为刚度矩阵。通过广义特征值分析,获得多自由度系统的前n阶固有频率(ω1,ω2,…,ωn)和固有振型(φ1,φ2,…,φn),n阶振型向量可以构成如下振型矩阵Φ
Φ=(φ1φ2…φn)
(2)
根据模态的正交性,系统的任意n维振动可唯一地表示为各阶模态的线性组合
(3)
式中:zr(r=1, 2, …,n)是在模态空间描述系统运动的广义坐标,称为主坐标;
r表示模态阶次。各阶主坐标组成的列阵z为主坐标列阵
z=(z1z2…zn)T
(4)
将式(4)建立的主坐标代入式(1),并各项左乘ΦT可得

(5)
假设C为比例阻尼,作模态分解后得到n个独立的单自由度系统
(6)
假设结构的初始条件为任意的整体式初始位移,即

(7)
此时,式(6)的解为
(8)
式中:ωr为无阻尼固有频率;
ωdr阻尼系统固有频率;
ξr为阻尼比。
(9)
模态空间的初始位移zr(0)可以用物理空间的初始位移表示为
(10)
将式(8)代入式(3),可得系统响应
(11)
将式(11)中cos(ωdrt-θr)表示为
(12)
则系统响应可表示为

(13)
令
(14)
公式(13)可以简写为
(15)
式中,上标*表示复数的共轭。
任意整体式初始位移条件下系统响应具有脉冲响应函数的形式,脉冲响应函数是特征系统实现算法的输入条件[29]。
对于有限、离散时间的线性定常系统其状态方程可以表示为以下形式
(16)
式中:x∈RN为N维状态向量;
u∈RM为M维输入向量;
y∈RP为P维输出(观测)向量;
A为系统的状态矩阵,对于柔性结构,该矩阵表征了结构的质量、刚度和阻尼特性;
B∈RN×M为输入矩阵;
C∈RP×N为输出(观测)矩阵。
根据式(16),初始条件下系统的响应函数矩阵可表示为
Y(k)=CAk[x1(0)x2(0) …xM(0)]
(17)
利用响应函数构造Hankel矩阵
(18)
式中,ji(i=1,…,r-1)和ti(i=1,…,s-1)可取任意常数。对Hrs(0)进行奇异值分解Hrs(0)=UVWT;
由奇异值分解确定阶次并获得系统的最小实现
(19)
(20)
(21)

对矩阵A进行特征值分解,求得特征值矩阵G,然后求出特征向量矩阵φ。
φ-1Aφ=G,G=diag(g1,g2,…,gr)
(22)
式中:gr为矩阵A的特征值;
r为模态阶次。
根据矩阵A的特征值gr与系统特征值λr之间的关系确定模态频率ωr和模态阻尼比ζr
(23)
(24)
(25)

根据输出矩阵C与特征向量矩阵φ可确定模态振型矩阵φ[30]
(26)
利用模态置信准则(model assurance criterion, MAC)[31]检查两阶模态之间的相互独立性和一致性
(27)
式中:φu,φv均为振型向量;
u,v为模态阶次。
如图1所示为整体式初始位移条件下柔性结构模态辨识的流程图,实现步骤如下:
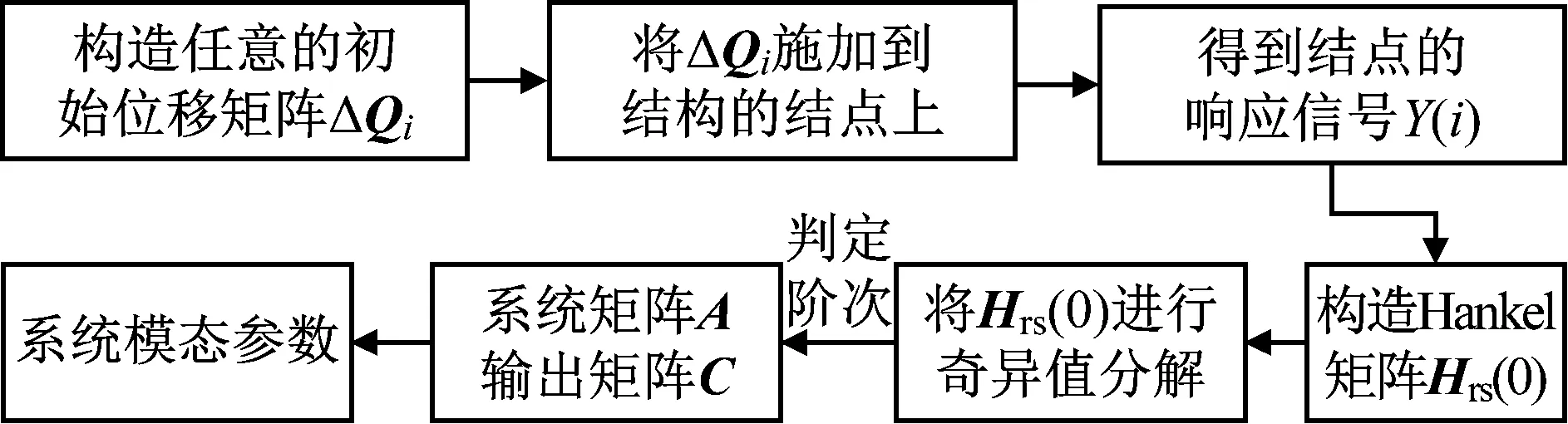
图1 整体式初始位移条件下模态辨识流程图Fig.1 Flow chart of initial displacement excitation method
(1) 构造任意的整体式初始位移矩阵ΔQi,将ΔQi施加到结构上;
(2) 通过测试,得到结构的响应信号(i);
(3) 利用响应信号Y(i)构造Hankel矩阵Hrs(0);
(4) 将Hankel矩阵进行奇异值分解,即Hrs(0)=UVWT;
(5) 通过奇异值曲线判定系统的阶次,获得如式(19)所示的系统矩阵A和输出矩阵C;
(6) 对系统矩阵A进行特征值分解,得到结构的模态频率ωr、模态阻尼ζr和模态振型矩阵φ;
本章通过30 m的三棱柱型桁架的仿真算例,以及带集中质量块的柔性梁的模态试验,验证施加整体式位移的激励方法对结构模态参数辨识的可行性。
4.1 桁架结构仿真
本小节以三棱柱型桁架作为研究对象,验证施加整体式初始位移的激励方法对结构模态参数辨识的可行性,研究噪声对辨识结果精度的影响。
如图2所示为桁架结构示意图,弦杆与腹杆均为截面为50 mm×20 mm矩形,单榀中组成三角形截面的梁单元长度为800 mm,单榀间连接梁的长度为1.5 m,整个桁架结构共有20榀,总长度为30.0 m。桁架为一端固定,即将节点21、节点42、节点63固定,通过表1的参数,采用梁单元建立其有限元模型,并计算前6阶模态参数,作为参考值。

表1 桁架结构建模参数Tab.1 Modeling parameters of truss structures

图2 桁架结构示意图Fig.2 Truss structure diagram

表2 有限元分析模态参数结果Tab.2 Modal parameter results of finite element analysis
4.1.1 施加任意初始整体式位移
本节研究给结构施加任意的整体式初始位移对结构模态参数辨识精度影响。给桁架的节点1和节点14沿y方向施加初始位移,分别为-10 cm和10 cm,如图3所示,使桁架得到一个整体式的位移,然后得到结构的响应信号。采样时间间隔为0.02 s,即采样频率为50 Hz,采样时间20 s,通过瞬态响应计算得到节点1~节点21的位移响应信号,将瞬态响应的位移数据导出,利用特征系统实现算法进行分析计算,得到如表3所示的模态辨识结果。无噪声条件下的稳态图如图4所示。

图3 任意整体式初始位移激励图Fig.3 Arbitrary initial displacement excitation diagram

图4 无噪声ERA稳定图Fig.4 Noise-free ERA stability diagram

表3 施加任意整体式初始位移ERA模态辨识对比结果Tab.3 Comparison results of modal identification of ERA with arbitrary initial displacement excitation
分析可知,通过对结构的1号点和14号点施加两个任意整体式初始位移激励,能识别出前6阶模态参数,且与理论值相比误差较小。由辨识结果可知,前三阶辨识模态频率的误差均在±1%以内,辨识阻尼比的误差均在±2%以内,最大的频率和阻尼比辨识误差均在±5%以内,从而施加任意整体式位移激励方法的可行性和精度。
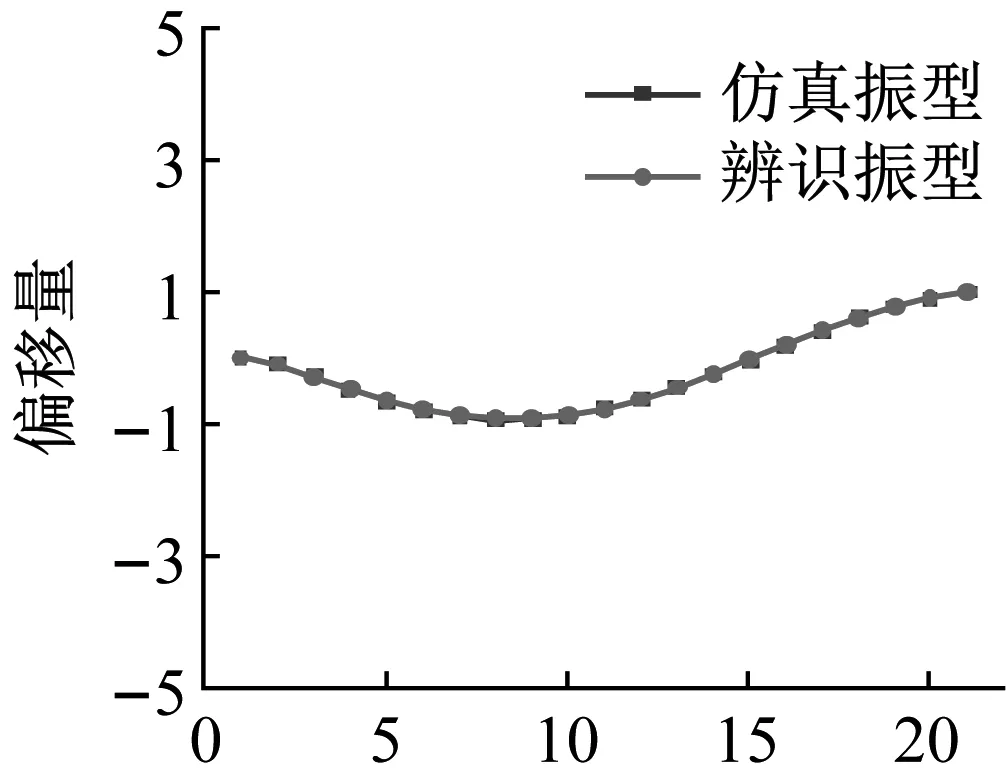
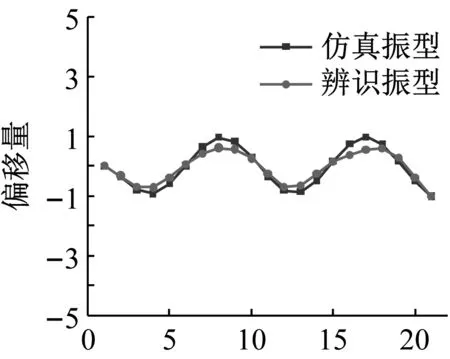
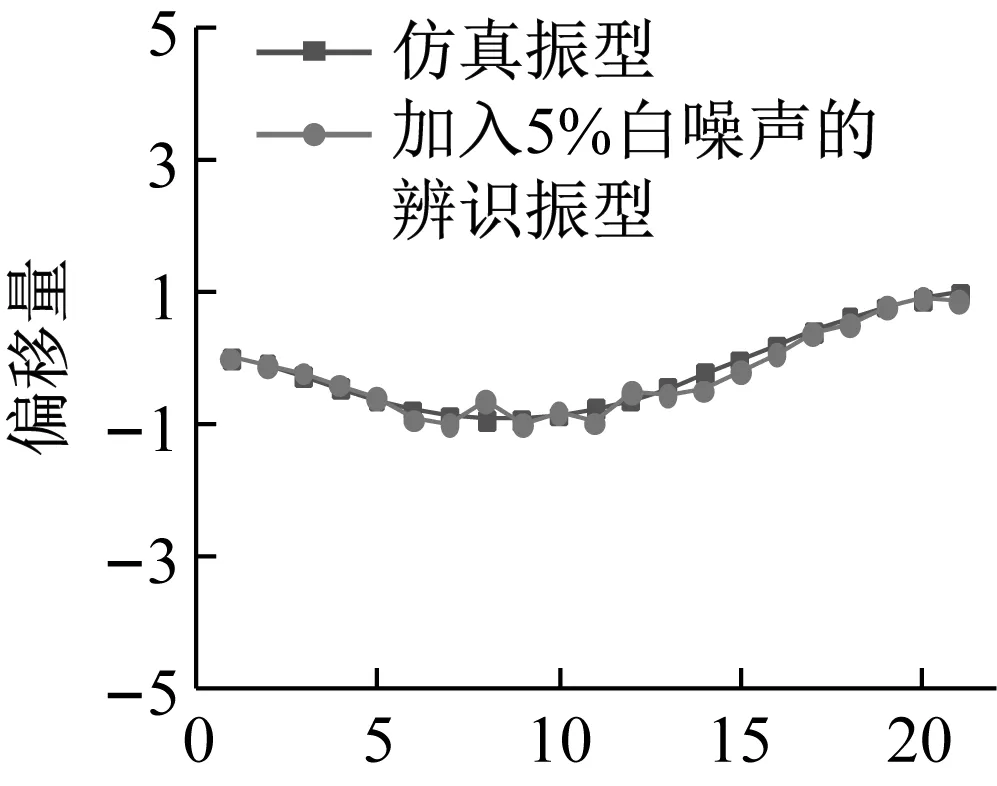
施加任意整体式初始位移激励辨识振型与仿真振型的对比结果如图5所示。

(a) 1阶振型对比图
(b) 2阶振型对比图

(c) 3阶振型对比图

(d) 4阶振型对比图
(e) 5阶振型对比图
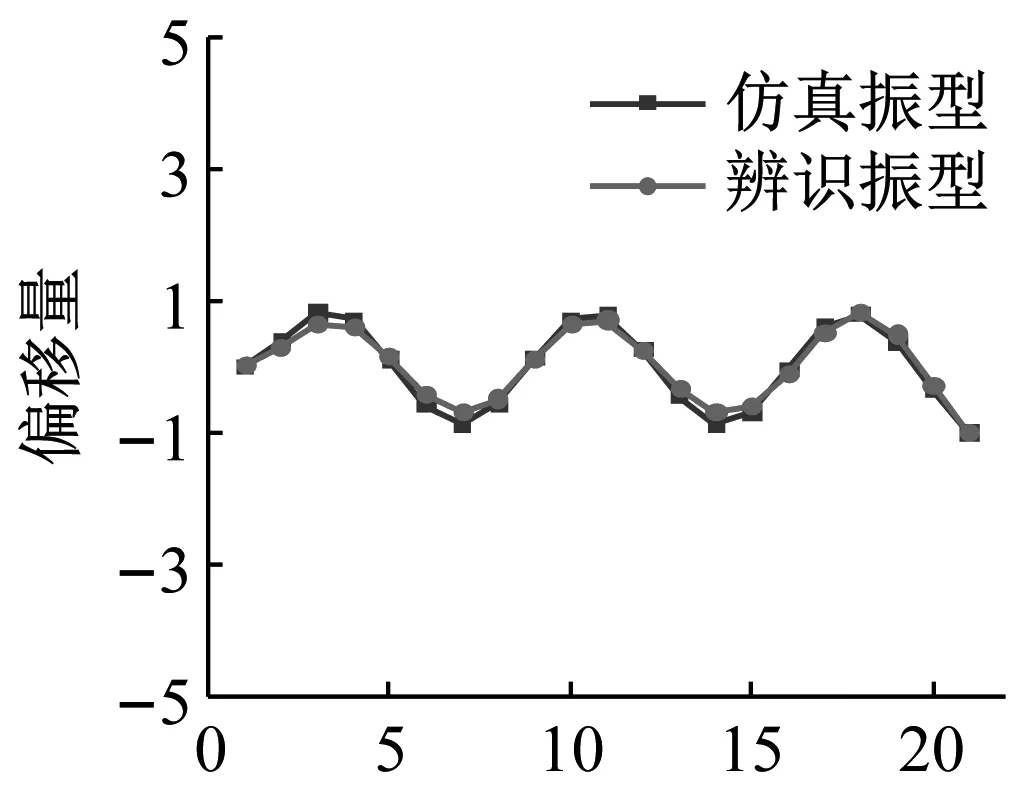
(f) 6阶振型对比图图5 任意整体式初始位移激励的辨识振型与仿真振型对比图Fig.5 Comparison diagram of the identified and simulated modes with arbitrary initial displacement excitation
根据模态置信度理论,施加任意位移激励ERA辨识振型与仿真振型MAC值对比,从图6可以看出,对结构施加任意整体式位移后ERA算法得到的试验模态振型与仿真振型匹配度较高,验证了在实际工程操作中,只对结构的某些结点施加任意整体式位移激励对结果模态辨识的可行性。
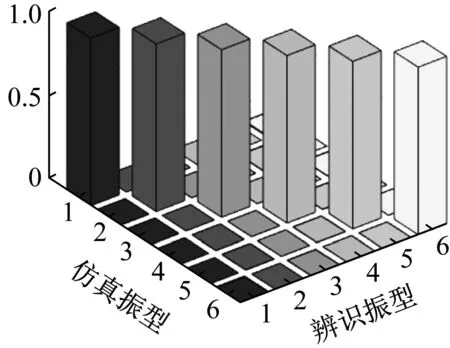
图6 辨识振型与仿真振型MAC值对比Fig.6 Comparison diagram of MAC values of the recognized and simulated modes
4.1.2 抗噪性能
由于实际工程操作中不可避免的存在噪声激励[32],本节研究本文所提出方法在5%白噪声激励下的模态辨识精度,按如下公式对位移激励信号加入噪声
Y′(i)=Y(i)×(1+0.05μ)
(28)
式中:Y′(i)为施加5%白噪声的信号;
Y(i)为原始位移激励信号;
μ为介于-1~1的随机数。
将施加任意整体式初始位移激励后得到的节点1~节点21的位移响应信号加入5%的白噪声,其中结点16响应数据加入5%白噪声信号前后对比如图7所示;
并将经过处理后的数据利用特征系统实现算法进行模态辨识,得到如表4所示的模态辨识结果。加入5%白噪声信号后识别得到的稳态图如图8所示。

图7 结点16响应数据加入5%白噪声信号前后对比图Fig.7 Comparison before and after adding 5% white noise signal to the data of point 16

表4 加入5%白噪声后ERA模态辨识结果Tab.4 Results of ERA modal identification after adding 5% white noise
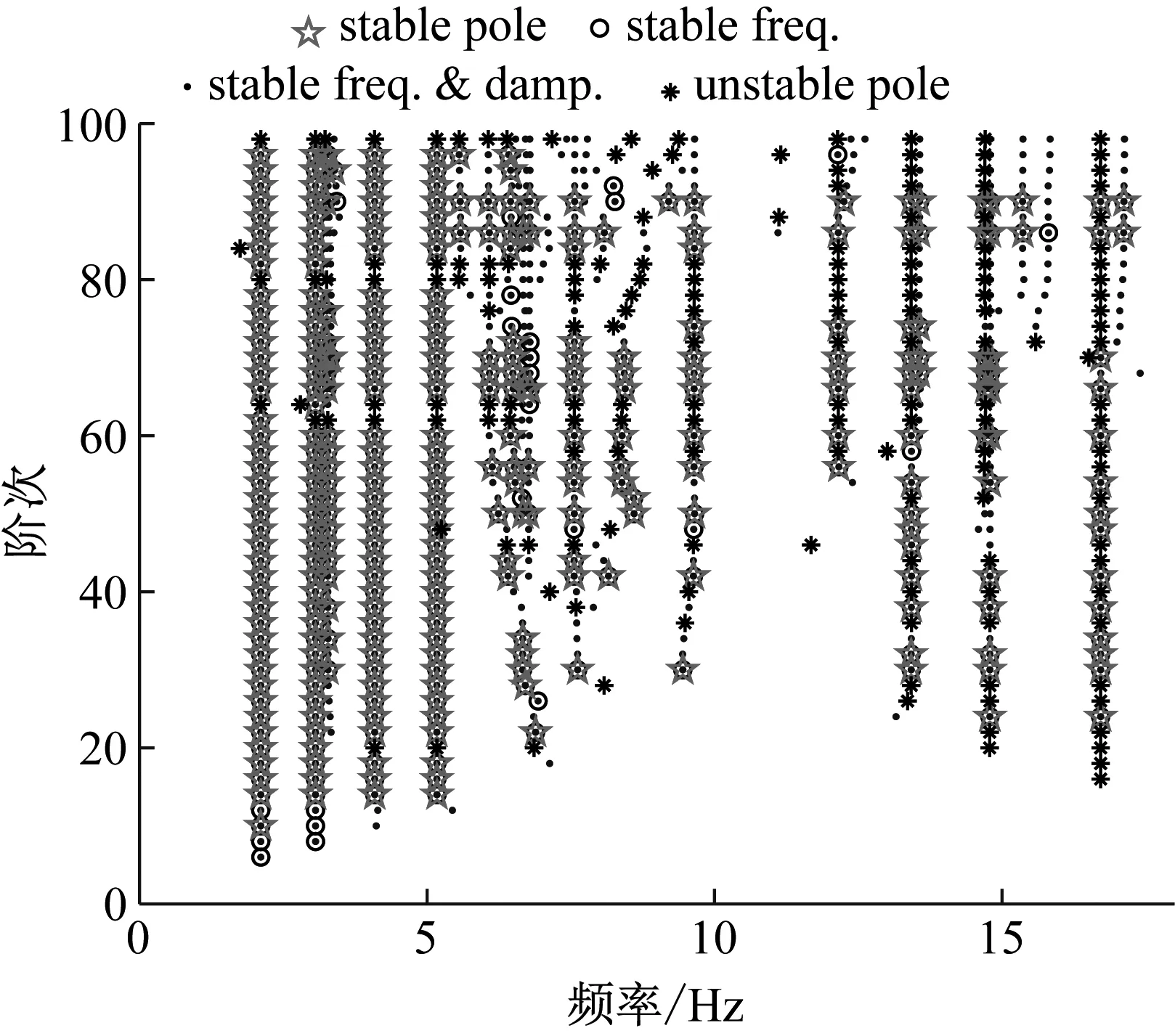
图8 加入5%白噪声后ERA稳定图Fig.8 ERA stability diagram after adding 5 % white noise
分析可知,加入5%白噪声后的ERA识别结果与有仿真结果吻合较好,前三阶辨识模态频率的误差均在±1%以内,辨识阻尼比的误差均在±2%以内,最大的频率和阻尼比辨识误差均在±5%以内。说明加入5%白噪声后ERA算法抗噪性能较好。加入5%的白噪声后的辨识振型与仿真振型对比结果如图9所示。

(a) 1阶振型对比图
(b) 2阶振型对比图

(c) 3阶振型对比图

(d) 4阶振型对比图

(e) 5阶振型对比图

(f) 6阶振型对比图图9 辨识振型与仿真振型对比(5%白噪声)Fig.9 Comparison diagram of the identified and simulated modes after adding 5% white noise
利用本文ERA算法将加入5%白噪声后辨识振型与仿真振型MAC值对比,从图10中可以看出,加入5%白噪声后辨识振型与有限元仿真得到的模态振型匹配度较高,模态置信度能达到0.9以上,说明加入5%白噪声后,本文提出方法模态参数辨识精度较好,抗噪性能较高。

图10 辨识振型与仿真振型MAC值对比(5%白噪声)Fig.10 Comparison diagram of MAC values of the recognized and simulated modes after adding 5% white noise
4.2 柔性梁试验
本小节针对带集中质量块的柔性梁,分别采用锤击法和整体式位移激励法进行模态试验,获得结构的模态参数,将两种不同激励方法的模态辨识结果进行对比,验证本文所提出方法的优越性、可行性和精度要求。
构造基频低于0.5 Hz的结构进行试验。试验对象为一端固定的细长柔性梁,截面为30 mm×2 mm的矩形,长度2 m,共分为11个测点,其中节点1和节点2进行固定,节点3~节点9布置集中质量块,并通过螺纹孔与柔性梁进行固定,每个集中质量块为1.13 kg,如图11所示。橡胶绳的材质为纯天然乳胶,内径3 mm,外径5 mm。4个压电式加速度传感器,型号为CA-YD-107,灵敏度分别为2.73 pC/ms-2,2.92 pC/ms-2,2.53 pC/ms-2,1.84 pC/ms-2,质量为28g,频率范围为1~5 000 Hz,精度误差小于2%。

图11 柔性梁结构图Fig.11 Dimension drawing of flexible beam
悬吊固支柔性梁的模型参数如表5所示。该结构形式简单,通过理论计算设计其基频,然后通过有限元仿真计算其模态参数。
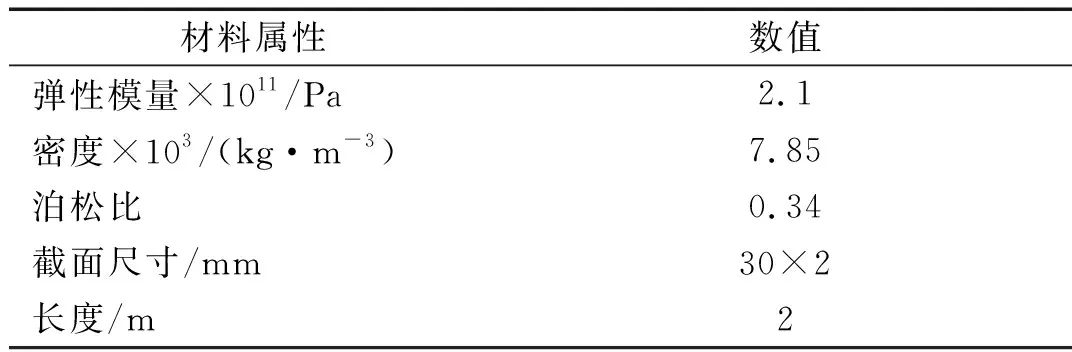
表5 悬吊固支柔性梁模型参数Tab.5 Model parameter of suspended and fixed flexible beam
分别采用锤击法和整体式位移激励法进行模态试验,试验步骤如下:
(1) 锤击激励法:采用橡胶绳进行对节点3、5、7、9进行悬吊,并在节点10布置加速度传感器,利用力锤别对节点3~节点10进行锤击,采集结构在0~40 s内的加速度信号,如图12(a)所示。

(a) 锤击激励法

(b) 整体式初始位移激励法图12 柔性梁试验现场图Fig.12 Field diagram of modal testing
(2) 整体式位移激励法:采用橡胶绳进行对节点3、5、7、9进行悬吊,并在节点4、6、8、10布置加速度传感器,利用细绳对节点6和节点11施加任意的整体式位移,采集结构在0~40 s内的加速度信号,如图12(b)所示。
将两种不同工况测得的加速度响应数据利用特征系统实现算法进行模态辨识,图13为锤击激励法频响函数曲线图和整体式位移激励法功率谱曲线图。

图13 锤击激励法频响函数曲线图和整体式初始位移激励法功率谱曲线图Fig.13 Frequency response function curve of hammer excitation and power spectrum diagram of arbitrary initial displacement excitation
锤击激励法得到的频率误差对比结果表6可知,由于结构基频较低,锤击激励法未能将结构基频激发,因此未能识别出结构的基频。锤击激励法辨识振型与仿真振型的对比结果如图14所示。

表6 锤击激励法频率误差对比Tab.6 Comparison of frequency error of hammer excitation test

(a) 2阶振型对比图

(b) 3阶振型对比图

(c) 4阶振型对比图图14 锤击激励法辨识振型与仿真振型对比图Fig.14 Comparison of the identified and simulated model shapes of hammer excitation test
整体式初始位移激励法频率误差如表7所示。分析结果表明,通过对结构的6号点和11号点施加任意整体式位移激励,能识别出前4阶模态参数,且与仿真结果误差较小,1阶频率误差为-3.44%,2阶频率误差为-4.48%,3阶频率误差为-3.07%,4阶频率误差为-4.53%;
施加整体式初始位移激励辨识振型与仿真振型的对比结果如图15所示。
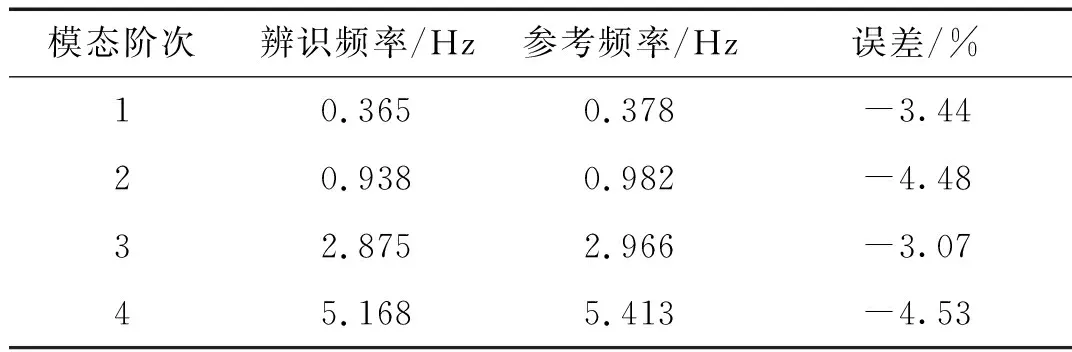
表7 整体式初始位移激励法频率误差对比Tab.7 Comparison of frequency error of arbitrary initial displacement excitation
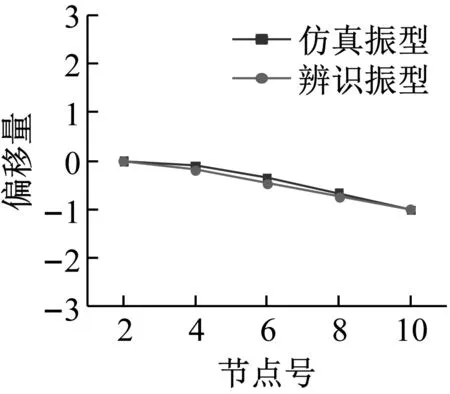
(a) 第1阶振型对比

(b) 第2阶振型对比

(c) 第3阶振型对比

(d) 第4阶振型对比图15 整体式位移激励法辨识振型与计算振型对比图Fig.15 Comparison of the identified and simulated model shapes of initial displacement excitation test
锤击激励法仅识别出第2、第3和第4阶模态参数,且这三阶的辨识振型与仿真振型的MAC值小于0.8,从而说明锤击激励法在低频柔性结构模态参数识别的局限性。
施加整体式初始位移激励ERA辨识振型与仿真振型MAC值对比,从图16(b)可以看出,对结构施加任意整体式初始位移后ERA算法得到的试验模态振型与仿真振型匹配度较高,MAC值对比大于0.9,进一步验证了在实际工程操作中,只对结构的某些结点施加任意整体式初始位移激励对结果模态辨识的可行性。

(a) 锤击激励法

(b) 整体式位移激励法图16 辨识振型与仿真振型MAC值对比Fig.16 Comparison of model identification and simulation model MAC values
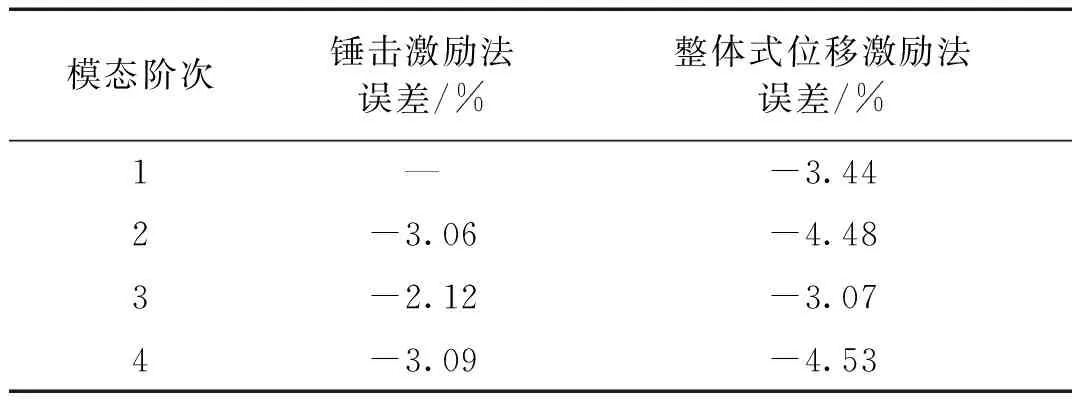
表8 不同激励方式频率误差对比Tab.8 Comparison of frequency error under different excitation methods
通过不同激励方式的辨识频率误差对比可知,传统的锤击激励法不能有效识别柔性梁的低频模态,而利用整体式初始位移激励法可以辨识出结构的低频模态,且频率误差为-3.439%,从而验证了本文所提出方法的优越性和可行性。
针对大型柔性结构难以整体激振的问题,提出了一种基于整体式初始位移激励的柔性结构模态辨识方法。通过30 m长桁架的仿真算例和带集中质量块的柔性梁模态试验,验证了本文所提出方法的可行性。
(1) 通过对结构施加任意整体式初始位移激励得到的响应数据进行模态辨识,频率最大误差在±5%以内,且辨识振型与仿真振型的MAC值大于0.9,施加使结构发生弹性变形的整体式位移,即可辨识出结构的模态参数。所提出方法具有一定的抗噪性能。
(2) 针对带集中质量块的柔性梁结构,锤击法不能有效识别其基频模态参数,而通过对结构施加整体式初始位移的方法,可以有效识别出带集中质量块的柔性梁结构的基频模态参数,从而验证了所提出整体式位移激励方法的可行性。
猜你喜欢振型柔性模态关于模态综合法的注记力学与实践(2022年5期)2022-10-21一种柔性抛光打磨头设计机械工业标准化与质量(2022年9期)2022-09-30纵向激励下大跨钢桁拱桥高阶振型效应分析兰州交通大学学报(2022年2期)2022-04-26灌注式半柔性路面研究进展(1)——半柔性混合料组成设计石油沥青(2021年5期)2021-12-02高校学生管理工作中柔性管理模式应用探索文化创新比较研究(2020年7期)2021-01-13塔腿加过渡段输电塔动力特性分析特种结构(2019年2期)2019-08-19车辆CAE分析中自由模态和约束模态的应用与对比广西科技大学学报(2016年1期)2016-06-22国内多模态教学研究回顾与展望湖北经济学院学报·人文社科版(2015年8期)2015-12-29结构振型几何辨识及应用研究山西建筑(2015年14期)2015-06-05基于HHT和Prony算法的电力系统低频振荡模态识别上海电机学院学报(2015年4期)2015-02-28








