贝叶斯框架下基于灰狼优化策略的多无人机巡检航迹规划
时间:2023-06-30 12:50:02 来源:雅意学习网 本文已影响 人 
单光瑞 赵 金 徐 婷 刘德凯
1(国家电网镇江供电公司 江苏 镇江 212000) 2(华雁智能科技(集团)股份有限公司 四川 成都 610000) 3(国家电网江苏检修公司 江苏 南京 210000)
随着多无人机协同巡检和人工智能技术的发展,其在应急管理、执勤执法、精准农业、实时监视等领域取得了较大的成效[1]。航迹规划[2]是多无人机智能巡检研究的一个重要方向,它不仅能够规划完成任务作业的路径,而且能够根据复杂环境的智能感知重新或调整规划轨迹,从而避免与其他飞行物发生碰撞。高压变电线路的航迹规划是安全巡检的前提和基础,目的是寻求最优路径完成对高压线路、杆塔、电网基础设备等监控和巡视,与其他应用领域不同,在监控位置点停留检查的同时需要考虑各种高空复杂的干扰因素,现有通过位置制定航线位置[3]、使用自动相关监视广播[4](Automatic Dependent Surveillance-Broadcast,ADS-B)系统传输飞行检查数据的方式,忽略了环境信息的动态变化,使规划效率较低、航线导航不准,难以解决巡检精准性问题[5]。国内外研究高空复杂环境下的动态航迹规划方法,主要有概率路标图[6](PRM)、几何地图识别[7](GMM)、扩展随机树[8](RRT)、粒子群优化[9](PSO)、全局优化元启发式方法[10]、强化学习方法[11]等,但这些方法应用于高空变电线路的航迹动态规划需要沿特定电力缆线排查和精细巡检执行,其检测区域需要在立体空间上开展搜索,因此较难适用于高空变电线路巡检的航迹规划策略。
当前,贝叶斯网络框架[12-13]融入机器控制系统[7]被广泛应用于求解路径规划的不同问题,其通过先验感知知识和观测证据知识来计算相关事件的概率,来预测当前系统行为的可能,可以解决空间上位置的多无人机巡检航迹规划,有利于对监控位置点的实时覆盖。文献[14]提出灰狼优化(Grey Wolf Optimization,GWO)方法的思想是基于捕食性灰狼的社会等级体系而发展起来,该方法构建了对不确定动态入侵干扰实体的信息,并在动态规划路径时构建强大的搜索功能,在许多不同的应用中的实现表明了它的稳定性和良好的收敛速度[15]。文献[16]采用了一种GWO来寻找无人机在复杂环境下的二维路径规划问题的最优路径;
文献[17]研究了多无人机协同目标跟踪问题,并将该问题表示为一个优化策略,结合模型预测控制(MPC)的实时性和GWO强大的搜索能力,以最优的方式实现轨迹规划。
本文在贝叶斯框架下利用基于距离的值函数(Distance Based Value Function,DBVF)和贝叶斯更新方法,建立了基于ADS-B提供的不确定信息的风险模型,将这些信息纳入基于灰狼优化的优化策略中,为变电线路上的多无人机巡检航迹构造问题提供服务,在基于Gazebo[18]平台上设计一个应用集成系统,实验验证分析监控点可达性和性能可行性。
1.1 作业任务描述
变电线路上的多无人机巡检作业任务包括杆塔巡检和线路巡检,具体描述为:按照指定轨迹沿导线近距离低速飞行,利用机载运动摄像机实时记录变电线路监控位置点上的缺陷或故障,实时报送地面服务站以安全控制变电线路。同时,识别威胁干扰因素(包括先验信息条件下的静态干扰事件pri_ob和无先验信息条件下的动态不确定干扰事件un_ob)。设在未知巡检区域R=L×W内,采用四旋翼无人机,寻找规划出无人机从初始位置x0,m到目标位置xf,m的可行巡检路径ρ,其包含了所有单位区域中被检测实体的集合,目标是寻找最优路径ρ*。
无人机以VU的速度在巡检区域的水平和竖直方向飞行,如图1所示,所有的监控位置点信息分布于未知环境区域中,巡检任务是对所在区域目标对象进行巡检,覆盖所有变电线路上的目标实体对象。

图1 巡检作业任务描述
1.2 框架模型
针对多台无人机在高压变电线路环境中作业任务的背景,贝叶斯框架下灰狼优化策略的多无人机协同巡检航迹规划由协同巡检模型和灰狼优化策略两个部分组成。其中,巡检模型从航迹代价评估、基于距离的值函数、干扰事件感知和基于单元权重的贝叶斯更新方法构建了不确定信息的风险图。航迹代价评估用于无人机实时调整并评估巡检的路径和方向,基于距离的值函数作用是使区域R划分为单元格相同的区域集合,从而计算每个单元格的值DBVF;
干扰事件感知模型的作用是为了接收动态和静态威胁干扰因素的事件,启动在贝叶斯框架下更新无人机的行为。灰狼优化策略控制无人机的巡检行为,用于在飞行过程中提供路径规划和自主导航,在干扰事件实体的推导下逐步更新无人机位置,从而达到对监控位置点的覆盖。贝叶斯框架下基于灰狼群优化策略巡检轨迹规划框架如图2所示。

图2 贝叶斯框架下基于灰狼群优化策略巡检轨迹规划框架
无人机通过传感器获得的外部不确定信息进行巡检航迹的感知,生成航迹行为的调整和位置行为控制的数据连接,并与灰狼优化策略共同作为航迹规划模型,形成贝叶斯框架下基于灰狼优化策略的航迹构造模式,为无人机航迹构造和调整模块环境感知的数据支持;
感知不确定信息风险模型与航迹构造共同触发灰狼优化策略,根据干扰事件实体侵入进行基于单元权重的贝叶斯更新推导;
可视化界面控制作用于地面控制平台与多无人机系统之间的交互操作,更好地分析研判无人机巡检的系统状态和航线管控;
干扰事件函数推导用于计算所有干扰事件实体的单元格,刻画干扰事件与无人机巡检的时间关系,生成观察因子,为无人机巡检航迹规划提供服务。
2.1 基于距离的值函数
采用航迹代价J评估巡检线路的优劣程度[19],以实时调整巡检的方向和线路,主要包括距离更新函数和威胁函数。距离更新函数的推导从贝叶斯框架的单元启发式更新方法中获取;
威胁函数由区域R内无人机到达障碍物的距离,该距离的威胁度量根据GPS动态计算得到。
将整个巡检区域R划分为相互嵌入的相同单元格集合φ,其初始权重函数是基于距离的值函数且单元权重随着目标位置距离的增加而增加,由式(1)计算距离值函数的单元格值。
(1)

2.2 干扰事件感知模型
为感知无人机在巡检过程中的实体对象和干扰事件,提出一种干扰事件感知模型。将感知模型量化为:第m台无人机在第i个空间单元邻近的单元集合φ中,存在发生碰撞的威胁程度,在时间t内的干扰事件感知模型表示为:
(2)

无人机、干扰物和无人机单元格φ如图3所示。

图3 无人机、干扰物和无人机单元格φ的示意图
2.3 干扰事件函数推导


(3)
设σ为一个将单元格区域集合φ作为参数的函数,并返回单元格集合的观察因子。基于所有动态干扰实体的单元格φ的总观察因子σ由式(4)得出。
(4)
3.1 基于单元权重的贝叶斯更新方法

首先计算干扰事件实体进入φ的后验概率,其推导内容描述为:
(5)
考虑式(5)中每个部分:
(6)

(7)
(8)

(9)

(10)

通过将以上公式计算所有可被动态威胁实体占用且属于区域φ的单元的概率相加,可以推导出单元的总值。
(11)
假设N1是集合φ(1)=(Hm∩Fm)的基数。N1表示受到无人机m周围威胁干扰影响的单元数量。φ(1)是下一步被威胁障碍占用的概率大于零的单元集合。图4显示了φ(1)和N1的不确定信息的风险模型。
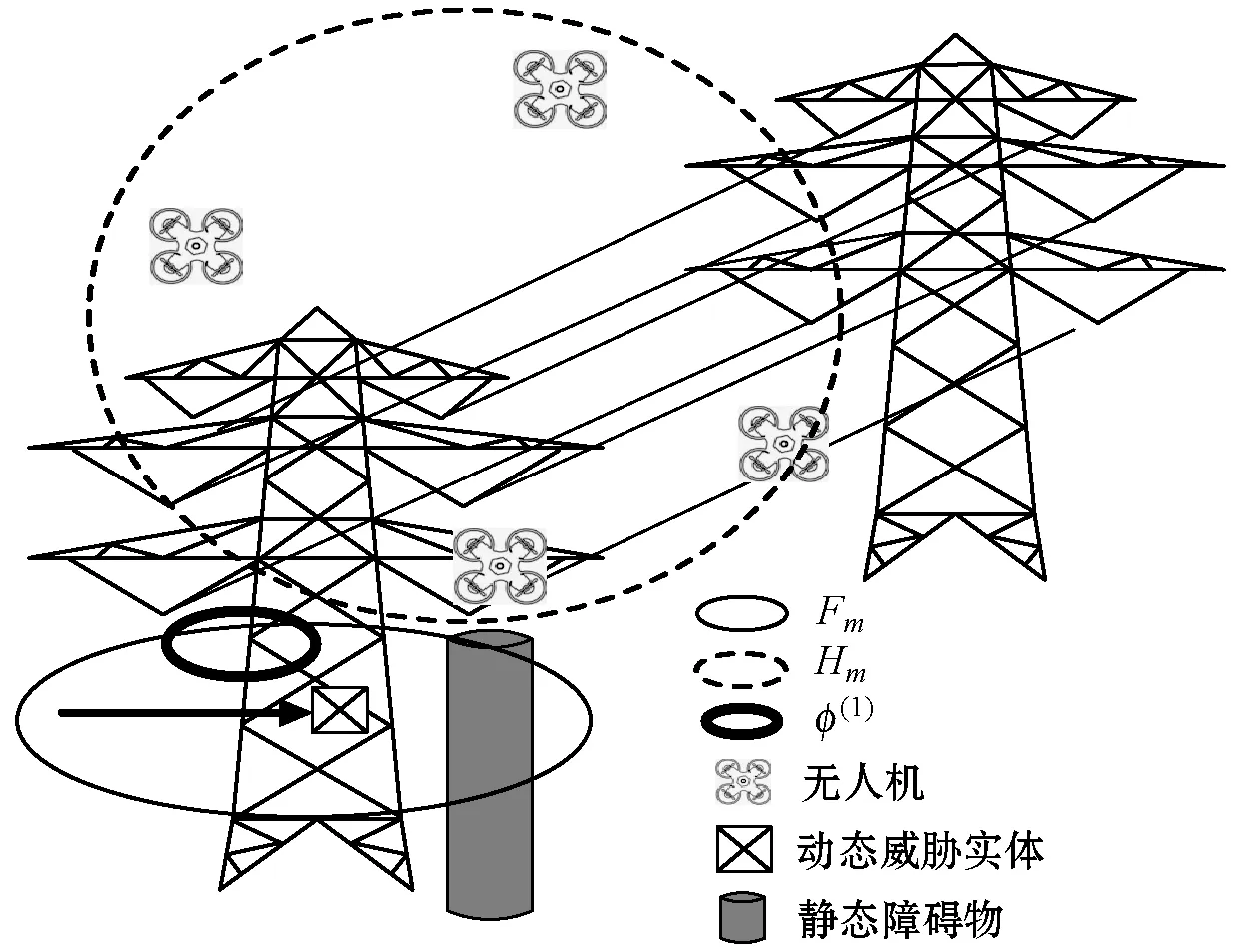
图4 φ(1)和N1的不确定信息风险图
3.2 灰狼优化策略

(12)


(13)
用于解决路径规划问题的算法如算法1所示,假设任意无人机的位置是优化问题的解,是无人机的控制输入。
算法1贝叶斯框架下的灰狼优化策略
输入:无人机数据组,动态干扰实体,贝叶斯更新后的行为集合。
设当下一个决策为非目标时
初始化灰狼数据包Z=[Z1,Z2,…,ZS],
t=1
搜索随机可行的路;
for UAVm∈[1,2,…,M] do
whilek≤kmaxdo
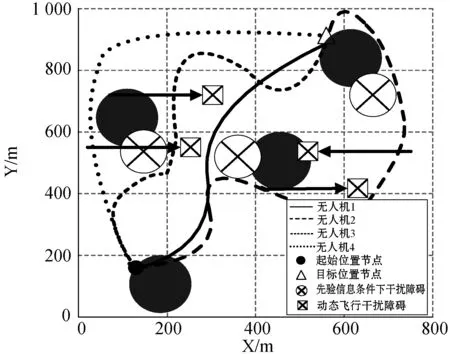
whiles 运用式(12)更新第w个无人机位置; 更新α,β和γ; end k=k+1; 评估J并将J进行排序; 获取最优的协同巡检路径或航迹 end 输出最优策略; 寻求下一个无人机监控点位置点 继续执行该算法,直到所有监控位置点巡检完成为止 end end 界面可视化处理 根据项目研究背景和内容,设计并仿真了二维和三维两种飞行场景,在每个仿真场景中,引入真实干扰实体,包括先验信息条件下的巡检模式和无先验证信息条件下的巡检模式,增加动态威胁实体突发事件,在接近多无人机系统一定距离后通知该事件,根据所提方法研发一个贝叶斯框架下的巡检多无人机应用集成系统。采用MATLAB验证本文方法的有效性。 (1) 先验证信息条件下巡检模式。在先验信息条件下的高压变电线路巡检模式下,4台无人机从初始任务位置,对区域R内拟定的4个变电线路杆塔进行飞行巡检,如图5所示,形成二维平面路径图(图5(a))和三维空间线路图(图5(b))。4台无人机在贝叶斯框架实时推导规划区域路径,在占有的单元格区域φ内的变电线路实体进行检测,准确研判静态干扰障碍物并进行有效的规避。 (a) 二维平面线路图 (b) 三维空间线路图图5 先验证信息条件下巡检模式 (2) 无验证信息条件下巡检模式。在无先验信息条件下的变电线路巡检模式下,4台无人机从初始任务位置,对区域R内拟定的4个变电线路进行飞行巡检,如图6所示,形成二维平面路径图(图6(a))和三维空间线路图(图6(b)),在实验时,模拟短时间高速动态飞行干扰障碍物的直线距离轨迹,如直风、鸟类直飞路径或直线电磁干扰等代表实际电路巡检过程中的突发事件,忽略长时间和曲线干扰路径等可通过传感器直接距离感知的事件。 (a) 二维平面线路图 (b) 三维空间线路图图6 无先验证信息条件下巡检模式 (1) 协同巡检系统性能。由图7(a)可知,通过贝叶斯框架下基于灰狼优化策略的航迹规划作用,4台无人机从起点位置点开始,其线路随着巡检距离的增加,逐步覆盖了所有监控位置点,进而4台线路达到收敛稳定,同时以相同的姿态和位置渐进飞行,对巡检对象进行覆盖。图7(b)进一步描述了系统成员之间变化情况,任意两台无人机成员之间的距离能够快速收敛并趋于稳定值,且形成矩形编队稳定距离值。这些得益于无人机系统在遇到动态干扰实体时,采用基于单元权重的贝叶斯更新方法,对单元区域φ内的静态和动态干扰实体进行推导,从而形成对变电线路的有效覆盖。 (a) 无人机覆盖监控位置点 (b) 各机之间的距离图7 无人机协同巡检系统性能 (2) 航迹代价分析。通过与启发式方法、粒子群优化方法、概率路标图方法计算航线代价值比较,如图8所示,从起始位置开始,经过威胁实体障碍的干扰,本文方法形成的航线经过整个区域R的航迹代价值较小且在120次迭代后趋于稳定收敛,这是由于在贝叶斯框架下对威胁实体进行了函数建模,对所有先验信息条件下的位置进行表示,将单元区域集合φ作为参数的函数,并返回单元区域集合的观察因子,实时推导被巡检目标的概率,在灰狼优化策略下还对每一次干扰实体进行递归,优化了线路构造的策略。而启发式方法和粒子优化方法收敛速度较慢,航迹代价值分别在250次迭代和200次迭代逐步降低; 图8 航线代价曲线比较 结合项目研究研发了一个贝叶斯框架下基于灰狼优化策略的巡检航迹规划应用集成系统,在变电线路巡检中进行模拟实验,由图9可知,系统采用Dronekit[21]搭配使用Ardupiolt[21]和PX4[21],在Gazebo平台上抽取成都郊区数字变配电线路数据,将数据导入系统中,在数据库查询基础上返回巡检结果,并且以图形化方式监控位置点信息。在集成系统中,显示了四台无人机的平稳运动,每台无人机可根据本文方法的轨迹高空巡检电力运行状况,在起初使用基于距离值函数的单元加权概念的有效贝叶斯形式,建立了自动相关监视广播提供的不确定风险模型,形成对风险监控的数据记录,在作业任务中利用灰狼算法处理静态和动态干扰障碍,从而完成对一个高空电力场景的巡检任务,应用于实际场景中提供了可视化模拟的效果。 图9 贝叶斯框架下基于灰狼优化策略的航迹规划应用集成系统 本文在贝叶斯框架下建立了基于ADS-B提供的不确定信息的风险模型,将不确定信息纳入灰狼优化的优化策略中,目的是为变电线路上的多无人机巡检航迹构造问题提供解决方案,不仅用实验方法验证本文方法的监控点可达性以及分析性能可行性,而且设计研发了应用集成系统,虽然在贝叶斯框架下解决了灰狼优化的不稳定性,但随着巡检区域面的增大,灰狼优化策略容易出现收敛速度较慢的缺点,下一步将考虑结合激光云点的方式,引入更具有特性描述功能的语义图或知识图谱表示方法,描述干扰因素和区域环境,更好地为巡检规划提供精确的航迹服务。
4.1 实验数据获取

4.2 巡检监控点可达分析




4.3 性能分析

概率路标图随着迭代次数的增加代价值波动较大,状态趋势不稳定。
4.4 系统研发










