基于图像处理的激光指向误差修正技术方法研究
时间:2023-06-14 09:10:19 来源:雅意学习网 本文已影响 人 
洪 莺,姚红权,胡芳仁,丁建永,李 雪,王军海
(1.南京邮电大学电子与光学工程学院、微电子学院,江苏 南京 210023;
2.南京先进激光技术研究院,江苏 南京 210038;
3.乌鲁木齐气象卫星地面站,新疆 乌鲁木齐 830011)
卫星激光测距技术(Satellite Laser Ranging,SLR)是一项应用广泛的空间大地测量技术。该技术实现过程是:利用SLR地面控制子系统发射高功率的激光脉冲信号,跟踪装载有后向反射棱镜的目标人造卫星,卫星接收并返回激光脉冲信号,完成星地间测距工作。目前,卫星激光测距技术已发展到自动化观测阶段,对激光脉冲的指向精度要求也越来高[1-3]。
为了实现激光脉冲对目标卫星的对准工作,通常需要根据星历预报驱动望远镜的自动指向,由于望远镜硬件控制系统中存在系统误差、随机误差等因素,指向的精度不可避免的与理论值产生偏差,需要地面值守人员观察CCD实拍的目标卫星与散射光尖点在图像中的位置关系来修正偏差。但直接观测效率较低且耗费人力,通过图像处理的方式对望远镜实拍的激光图像进行处理,可更高效率的为解决指向修正问题提供实时的误差数据反馈,达到指向修正的目的。
国内学者对于误差修正技术的图像处理方法研究主要聚焦在激光散射光尖点定位与目标卫星点定位这两项工作上。对于激光散射光尖点定位,目前有利用矢量边界扫描法[4],最小二乘法[5]、霍夫变换法[6]检测并标定光尖点位置,但这些方法在强噪声背景环境下仍存在一定的误差。另外在目标卫星定位方面,多数研究只是单一地提取卫星质心,对望远镜观测视场内是否存在干扰星象的情况并未做讨论研究。
针对上述问题,本文提出了一种具有抗干扰性的指向修正图像处理算法实施方案。利用拉东变换直线检测法寻找激光光束边缘轮廓并标定散射光尖点,在强噪声背景干扰的情况下仍能实现对光尖点的精确定位。同时在目标卫星的识别上,消除了图像内恒星过境的干扰轨迹,准确识别出卫星星象质心坐标。通过望远镜硬件参数自动识别出激光对准卫星的指向误差,并通过误差反馈修正激光指向。经试验验证,该方案在实际应用中运行可靠且具有较强的抗干扰性,利于提高卫星测距系统中的指向修正效率。
图1为本文图像处理流程:图像处理流程主要包括四个部分,分别是图像预处理、散射光尖点定位、目标卫星定心和指向误差修正。
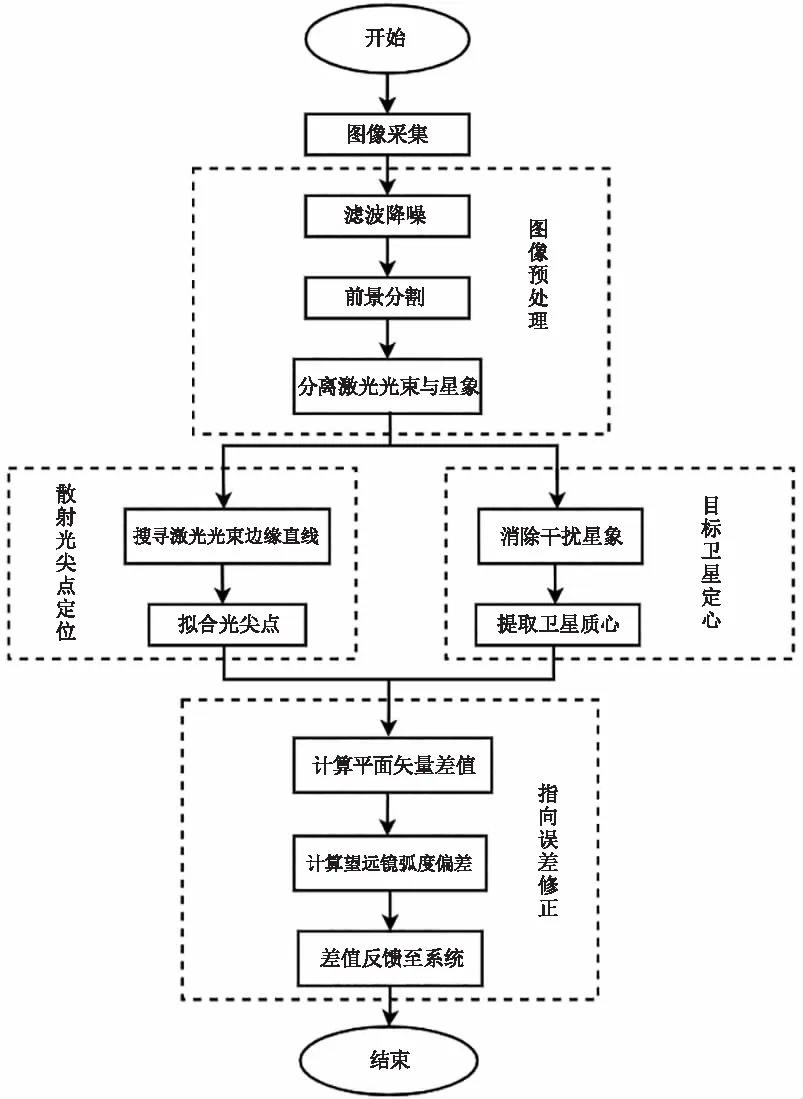
图1 图像处理流程图Fig.1 Flow diagram of image processing
2.1 图像预处理
本文处理的CCD图像是位于乌鲁木齐气象卫星地面站内地基激光定位系统在夜间作业时拍摄的(图2),由于存在城市灯光的污染、相机噪声等因素,易出现图像模糊、激光光束与星象能见度低的现象,为了更好地开展后续的目标定位的工作,需要对原始的图像进行滤波去噪、前景提取的预处理工作。

图2 激光图像Fig.2 Laser image
2.1.1 滤波去噪
常用的滤波方法有均值滤波法、中值滤波法等。均值滤波的思路是确定一个模板的大小,将图像中任意像素点作为该模板的中心,计算模板内所有像素点对应灰度值的平均值,该平均值替换为中心点的原始值。不足之处在于,对边缘细节灰度值突变较大区域的降噪效果不明显。为了尽可能在剔除噪声的情况下保留目标的边缘和细节[7],本文采用中值滤波法。中值滤波法是一种非线性滤波方式,该方式将模板内任意像素点作为中心点,对模板内的所有像素点按灰度值大小排序,排序后求得的像素中值替换为中心点像素的灰度值。表达式为:
g(x,y)=med{f(x-k),(y-l),(k,l∈w)}
(1)
其中,f(x,y)为输入的原始图像;g(x,y)输出图像;w为大小是k×l的二维模板。
随机选取模板大小为3×3的激光图像矩阵,其原始灰度值f(x,y)分布如下:
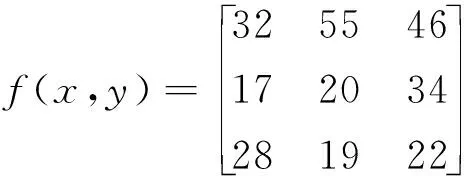
(2)
矩阵中心点灰度值为20,将模板内所有像素点排序后得取得中值为28,令此中值替换为原始中心点灰度值。继续以此模板遍历整副激光图像的像素点,直至遍历完成。滤波后图像如图3所示。

图3 中值滤波后的图像Fig.3 Median filtered image
2.1.2 前景分割
图像中前景分割的目的在于将图像中的目标信息与背景信息分离,可根据图像灰度值差异进行分离。图4为采集到的激光图像的灰度直方分布图。

图4 激光图像的灰度分布直方图Fig.4 Histogram of gray distribution of laser image
图4中灰度值分布存在明显差异,可直观地选择一个合理的灰度值(即阈值)实现前景分割。
分割的好坏关键在于阈值的选取。常用的阈值选取方法有自适应阈值法和阈值二值法。阈值二值法通过人为手动设置一个阈值,难以满足实际应用中对图像时效性的要求。自适应阈值法可针对图像不同的区域,自适应计算不同的阈值,既无需人员手动设定阈值,又适用于背景环境明暗不均的天文图像。本文采用自适应阈值法对图像进行前景分割,分割结果如图5所示。进一步根据前景信息面积比进行分割,可将光束与星象分离[8]。

图5 自适应阈值法得到的二值图像Fig.5 Binary image obtained by adaptive threshold method
2.2 后向散射光尖定位
图像中的散射光尖点可以被看成是光束边缘两条直线的交点,关键点在于精确地搜寻检测出光束的边缘直线。本文使用Radon(拉东)变换技术解决激光散射图像光束边缘直线检测的问题。该技术相较于Hough直线检测,具有更强的抗干扰能力与实时性[9-10]。
2.2.1 Radon变换原理
Radon变换的实质是一种投影变换,也可看作是图像的灰度值分布函数沿给定角度的线积分,函数经过运算后将原始域的坐标投影到了Radon域上。本文待处理的数字图像矩阵特征是离散的,在离散情况下,Radon变换的数学定义为[11-12]:

(3)
其中,f为灰度值分布函数;R为Radon变换后的积分值;M、N规定了图像尺寸;x、y为原始域的坐标;ρ、θ为Radon域的坐标。
2.2.2 Radon变换直线检测原理
Radon变换直线检测的实质是将原始图像域中的“直线”转换为Radon域内的“点”,体现在:对于x-y(原始)域内的待测图像,若存在多个像素点共线,这些共线像素点沿其所在直线的法线为积分路径进行线积分,在ρ-θ(Radon)域内投影成一个“点”,如图6所示:
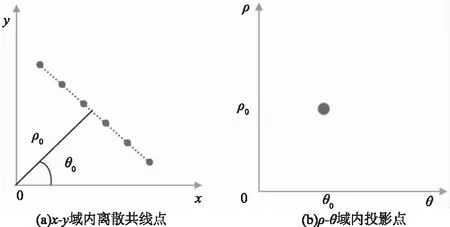
图6 离散共线点的拉东变换图Fig.6 Radon transformation diagram of discrete collinear points
设投影点坐标为(ρ0,θ0),代入式(3)中,得出:
(4)
R为共线像素点灰度值的累加和,共线像素点个数越多,像素点灰度值越高,相应的R也越大,因此投影点可看作是一个局部峰值点。若Radon域中存在局部峰值点,在原始域中有相应的共线像素点与其对应。
设图像中的共线像素点所在直线法线与x轴的夹角为θ(θ为Radon域坐标),在θ∈[0°,180°]区间内选择一组等角度间距的直线作为线积分路径,对整副图像进行线性Radon变换,确定一个经过变换后的积分值阈值,找出超出该阈值的“局部峰值点”,可对应求出原始图像空间内对应的待测直线。
2.2.3 后向散射光尖定位算法实现
基于对上述原理的分析,光尖点定位步骤为:
(1)采用Canny算子对经过预处理后的激光图像边缘提取。经提取后边缘像素点具有高灰度值,利于确定峰值点。
(2)设直线积分路径与原始图像域内x轴的夹角为θ,在θ∈[0°,180°]区间上选取一组等角度间距为ξ=1°的直线积分路径,对经过边缘提取后的激光图像进行线性Radon变化。
(3)设定合理的拉东变换积分值阈值RT(本文RT设定为50),找出Radon变换空间上超过给定阈值的2个局部峰值点。
(4)计算超过给定阈值的局部峰值点对应的直线的斜率,确定直线方程。计算两条直线交点(即光尖点)。
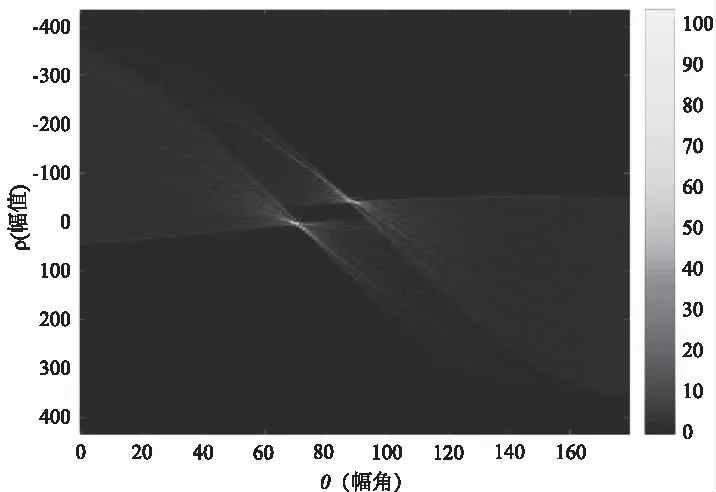
图7 Radon变换空间上的局部峰值点分布图Fig.7 Distribution of peak points in Radon transform space
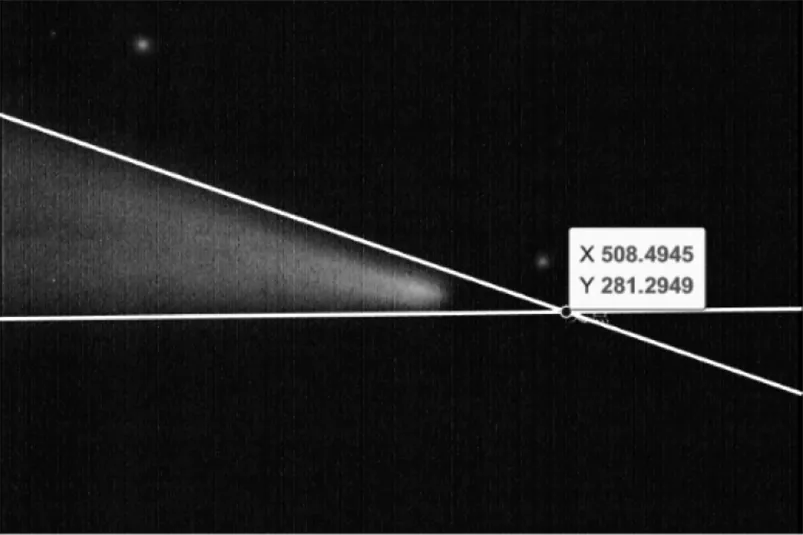
图8 光尖点定位图Fig.8 Laser tip location image
2.2.4 算法抗干扰能力分析
为了验证Radon变换检测激光图像直线的抗干扰性,分别利用Hough变换直线检测算法和Radon变换直线检测算法对叠加了不同强度高斯噪声激光图像进行测验。测验环境为Matlab2019a,图像尺寸为720×480。叠加的噪声参数标准差σ分别为0、0.05、0.4和0.6。检测精度(角度间距)为ξ=1°。测验结果如图9、10所示。

图9 Radon变换直线检测实验结果Fig.9 Experimental results of Radon transform line detection
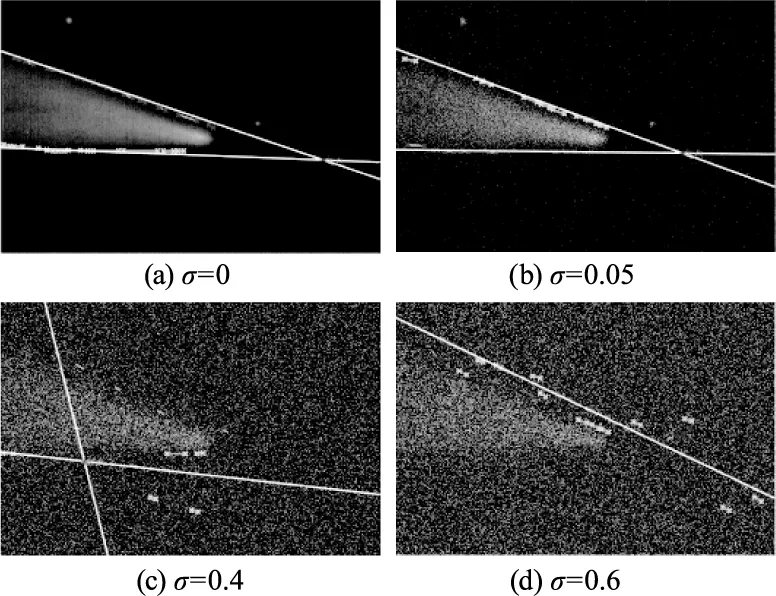
图10 Hough变换直线检测实验结果Fig.10 Experimental results of Hough transform line detection
结果表明,随着噪声强度不断增加,Radon变换直线检测仍能准确检测出光束边缘直线,Hough变换直线检测在噪声标准差为σ=0.4、σ=0.6时无法正确识别光束边缘。得出结论,Radon直线变换对图像光尖点拟合处理具有更高的容错率。
2.3 目标卫星定位
目标卫星定位是指向偏差修正的关键步骤,本文对目标卫星定位工作包括消除恒星星象和卫星质心提取。
对于消除恒星星象,具体步骤为:
(1)每隔500 ms取得一帧望远镜拍摄的星点图,取满N帧。对每帧图像进行预处理。
(2)对N帧图像的像素点灰度值求和取均值。保持静止的目标卫星区域内像素点灰度值经过计算后保持高亮度值,而不断移动的恒星区域内像素点灰度值降低,形成一个低灰度值的运动轨迹(图11)。

图11 恒星轨迹与目标卫星Fig.11 Stellar tracks and target satellite
(3)设定阈值对图像进行二次分割处理,将恒星星象轨迹抹为背景信息,仅保留卫星星象(图12)。

图12 二次阈值处理后的图像Fig.12 Image after secondary threshold processing
对于卫星质心提取,本文采用带阈值的质心法[13]求解。相较于传统质心法,处理速度更快,精度更高。该方法是对图像中大于背景阈值T的像素点求质心。星点图像已经过二值处理,背景阈值T=0。设x0和y0分别为大于阈值像素点区域的质心坐标,表示为:
(5)
此时,

(6)
f(x,y)为经过预处理后的图像灰度值,F(x,y)为经过阈值修正过的图像灰度值。
2.4 指向偏差修正
指向修正工作需要结合前文散射光尖点定位与星点定位的工作。设拟合光尖点坐标为(xl,yl),目标卫星坐标(xs,ys),两者的平面坐标矢量差值(Δx,Δy)=(|xl-xs|),(|yl-ys|),根据弧度差转化公式将该平面坐标矢量差值转换为望远镜指向弧度差(δx,δy),转化公式为:
(7)
其中,f为光学望远镜有效光学焦距,μ为接收相机CCD的像素尺寸。
通过将解算出的指向弧度偏差实时反馈给望远镜指向控制系统,调整激光光束的指向角度,可完成误差补偿修正工作。
为了验证指向误差修正算法在实际应用中的通用性、可靠性和可行性,指向偏差修正测试环境定于乌鲁木齐气象卫星地面站内地基激光定位分系统。
图13为系统某一时刻图像采集子系统的运行界面,接收相机的有效像素为720×480,此时采集到的视频图像中激光光束、目标卫星、恒星均位于同一视场内。

图13 系统运行界面Fig.13 System operation interface
观察到光束方向与目标卫星在视场内相对距离位置较远,应用前文所述算法进行实时指向误差修正,修正过程如图14所示。

图14 系统中的实时修正过程Fig.14 Real time correction process in the system
测试结果表明,该算法满足系统指向误差精度要求。又经过多组实验测定,指向弧度偏差稳定在2″内。方案在稳定性,抗干扰性方面均满足系统实际需求,现已予以投入使用。
利用本文提出的激光指向误差修正图像处理算法的实现方案,可快速识别激光光束边缘直线,精确地拟合出激光位置,同时解决了望远镜视场内恒星过境的问题,实现了对卫星星象位置的动态检测,并通过结合硬件参数计算出了光尖点与卫星的位置误差,大大提升了激光系统的工作效率,具有较高实用意义。
猜你喜欢 像素点指向灰度 采用改进导重法的拓扑结构灰度单元过滤技术北京航空航天大学学报(2022年6期)2022-07-02科学备考新指向——不等式选讲篇中学生数理化(高中版.高考数学)(2021年6期)2021-07-28Bp-MRI灰度直方图在鉴别移行带前列腺癌与良性前列腺增生中的应用价值天津医科大学学报(2021年1期)2021-01-26基于局部相似性的特征匹配筛选算法现代电子技术(2021年1期)2021-01-17基于5×5邻域像素点相关性的划痕修复算法上海大学学报(自然科学版)(2018年5期)2018-11-02基于canvas的前端数据加密电脑知识与技术(2018年35期)2018-02-27把准方向盘 握紧指向灯 走好创新路传媒评论(2017年8期)2017-11-08基于最大加权投影求解的彩色图像灰度化对比度保留算法自动化学报(2017年5期)2017-05-14基于逐像素点深度卷积网络分割模型的上皮和间质组织分割自动化学报(2017年11期)2017-04-04基于像素重排比对的灰度图彩色化算法研究浙江理工大学学报(自然科学版)(2015年7期)2015-03-01








