静液驱动履带车辆行驶控制策略研究
时间:2023-06-01 13:40:32 来源:雅意学习网 本文已影响 人 
陈漫,张存振,马彪,薛嘉琪,郑良杰,于亮
(北京理工大学 机械与车辆学院,北京 100081)
静液驱动系统因具有功率密度高、可实现无级变速和布置灵活方便等优点,在农林和工程机械等特种车辆传动中得到广泛应用[1-3]。如何协调两侧马达动力输出以精确实现驾驶员意图,是静液驱动履带车辆行驶控制研究的重点[4]。
目前,众多学者对静液驱动履带车辆行驶控制问题进行了广泛研究,其中,比例-积分-微分(proportion-integral-differential, PID)控制因结构简单,参数调节方便而得到广泛应用。Zheng等[5]为提高静液驱动履带车辆转向行驶稳定性,设计了基于模糊PID控制的车速控制器和基于滑模控制的横摆角速度控制器,但车辆转向进入稳态后马达输出转矩存在小幅抖振现象。陈阳等[6]针对静液驱动系统马达转速跟踪控制设计了神经网络PID控制器,改善了静液压驱动系统的操控性能,减小了马达转速跟踪时的超调。Zhu等[7]对烟叶采收机两侧静液驱动系统进行动力学解耦控制,并针对每个通道设计了环路整形控制器和前置滤波器,提高了系统的动态跟踪性能,但马达转速会因地面阻力不确定性而产生稳态跟踪误差。Backas等[8]采用非线性模型预测控制算法控制马达输出转速,实现了转速无静差控制,但该算法需建立准确的被控对象数学模型,同时对控制器硬件要求较高,实车应用难以保证实时性。
针对具有负载扰动、参数时变的静液驱动系统,控制器设计必须具备较强抗干扰能力及参数鲁棒性。自抗扰控制算法(active disturbance rejection control, ADRC)将系统异于标准型的部分视为总扰动,通过扩张状态观测器和反馈控制律对总扰动进行实时估计并加以补偿,提高了系统的鲁棒性。徐莉萍等[9]针对铣面机床电液位置伺服系统设计了ADRC控制器,提高了系统的位置控制精度,但ADRC需整定的参数较多,限制了其在工程中的广泛应用。线性自抗扰控制(linear active disturbance rejection control, LADRC)算法将带宽的概念引入控制器设计,大幅简化了控制器结构,便于工程人员理解与应用[10]。王立新等[11]对液压伺服系统设计了LADRC控制器,提高了双液压执行器的同步控制精度。
本文建立了以两侧马达目标转速为输入的静液驱动履带车辆数学模型,制定了基于马达转速调节的车辆行驶控制策略,针对静液驱动系统负载扰动和参数时变问题,采用LADRC控制算法设计马达转速控制器,通过仿真分析验证了车辆行驶控制策略的有效性。
静液驱动履带车辆传动系统结构如图1所示。传动系统主要由增速箱、变量液压泵、液压马达和侧传动组成。发动机动力经增速箱分别传递给两侧泵-马达系统,后经侧传动传递至主动轮驱动整车行驶。发动机为电控柴油机,采用转速控制模式,可根据控制指令输出较为稳定的期望转速。车辆行驶过程中,可通过改变液压泵的排量调整两侧马达输出转速,实现车辆的变速和转向。

图1 静液驱动履带车辆传动系统结构
1.1 静液驱动系统数学模型
履带车辆单侧静液驱动系统是由泵和马达组成的闭式容积调速系统,其结构形式如图2所示,其中变量泵排量由比例阀和排量控制油缸调节。由于两侧静液驱动系统结构完全一致,因此仅对单侧系统进行分析。
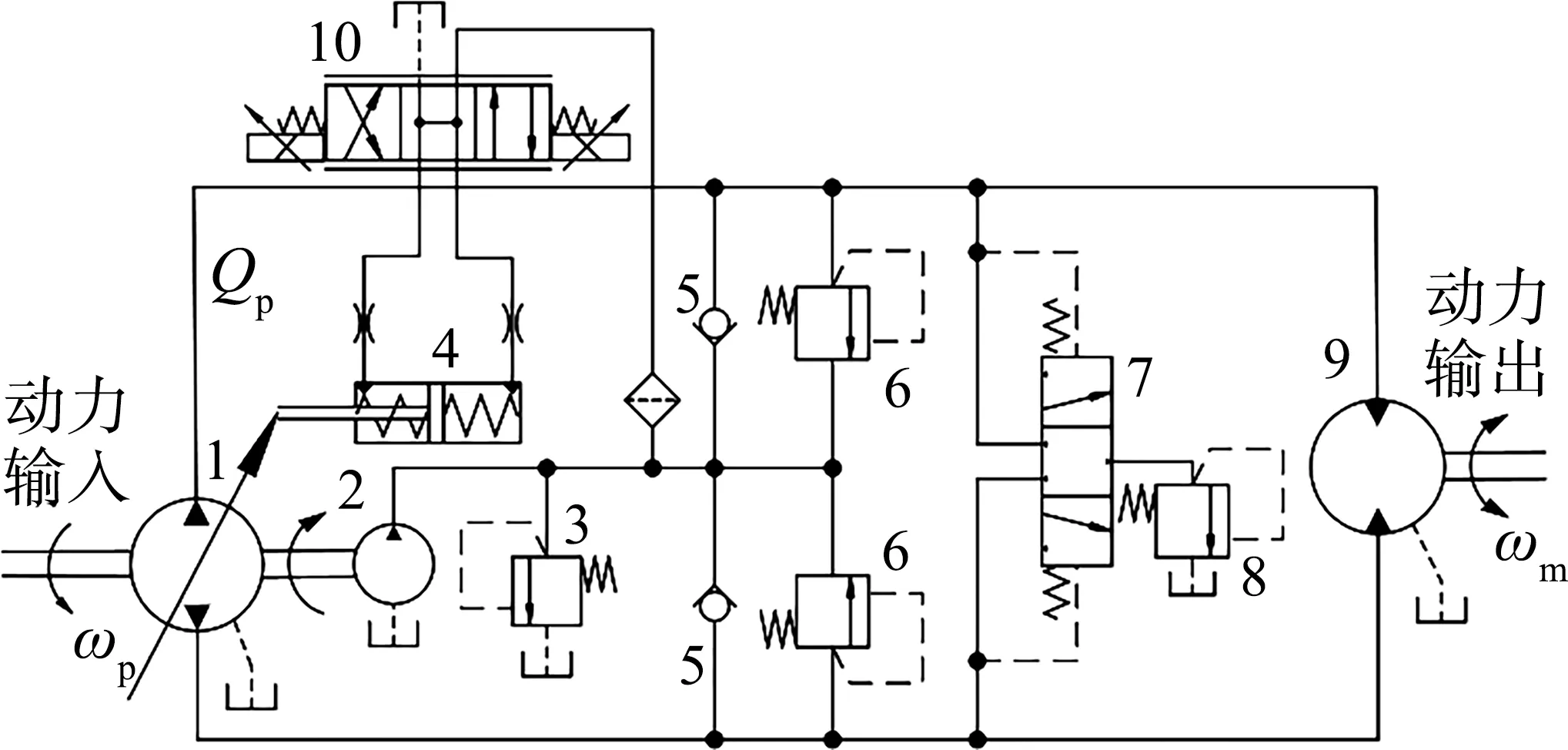
1-变量液压泵;2-补油泵;3-补油溢流阀;4-排量控制油缸;5-单向阀;6-安全阀;7-换向阀;8-低压溢流阀;9-液压马达;10-比例电磁阀。
将排量控制机构的动态响应简化为一阶惯性环节[12],即
(1)
(2)
式中:Tp为变量泵时间常数;
xp为泵排量比;
Vp和Vp,max分别为泵的实际排量和最大排量;
KI为变量泵比例系数;
Ip为比例阀电磁铁线圈通过的电流。
变量泵输出流量Qp为
Qp=xpVp,maxωp-Cip(ph-pb)-Cepph,
(3)
(4)
式中:ωp为泵输入转速;
Cip和Cep分别为泵的内泄漏系数和外泄漏系数;
ph为泵-马达高压管路中的工作油压;
pb为补油压力,并假设补油压力恒定;
ne和iq分别为发动机输出转速和增速箱传动比。
泵-马达流量连续性方程为
(5)
式中:Cim和Cem分别为马达的内泄漏系数和外泄漏系数;
Vm为马达排量;
ωm为马达输出转速;
V0和βe分别为高压腔总容积和液压油体积弹性模量。
马达-负载转矩平衡方程为
(6)
式中:Tm为马达输出转矩;
Jm和Bm分别为马达及负载折算至马达输出轴上的等效转动惯量和黏性阻尼系数;
TL为马达输出轴负载转矩。
对式(1)、(3)、(5)、(6)进行拉氏变换,整理得到系统传递函数
(7)
式中:up为控制量,up=KIIp;
Ct为泵和马达的总泄漏系数,Ct=Cip+Cep+Cim+Cem。
1.2 履带车辆动力学及运动学模型
履带车辆的运动可以分解为车辆随其平面中心的平移运动与绕其平面中心的旋转运动。为便于理论分析,假设车辆在水平路面上行驶,车辆质心与几何中心重合。由于整车行驶速度较低,因此履带接地段的滑转和滑移可以不计,忽略车辆行驶过程中的空气阻力及转向离心力。履带车辆运动学及动力学原理如图3所示。
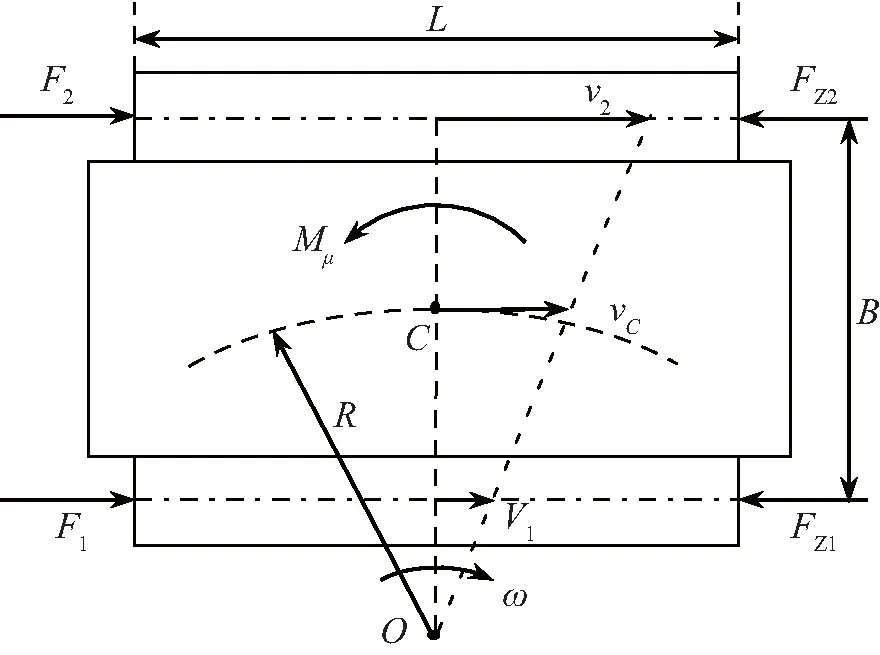
图3 履带车辆运动学及动力学原理图

两侧履带所受地面滚动阻力及转向阻力矩为
(8)
(9)
(10)
式中:m为整车质量;
g为重力加速度;
f和μ分别为地面滚动阻力系数和转向阻力系数;
μmax为最大转向阻力系数。根据式(8)—(10),车辆内、外侧履带接地段所受地面阻力为
(11)
由式(11)可得内、外侧马达输出轴的负载转矩为
(12)
式中:rz为主动轮半径;
ic为侧传动减速比;
η为行走装置的效率,根据经验公式,η=0.95-0.001 7vC。
车辆内、外侧履带速度为
(13)
式中ωm1和ωm2分别为内、外侧马达输出转速。
车辆行驶速度和相对转向半径倒数为
(14)
基于马达转速调节的静液驱动履带车辆行驶控制系统结构如图4所示。图4中,α和φ分别为驾驶员输入的加速踏板角位移和方向盘转角信号。整车行驶控制单元将驾驶员操作信号解释为两侧马达目标转速ωm1,d和ωm2,d。受发动机转速和变量泵排量限制,马达输出转速有限,当马达目标转速超出最大输出转速限制时,整车行驶控制单元需对车辆行驶控制目标进行修正,以最大限度实现驾驶员操作意图。两侧马达转速控制器同时接收马达目标转速与实际转速信号,通过改变变量泵的排量调节马达实际转速与目标转速一致,实现闭环控制。

图4 履带车辆行驶控制系统结构
2.1 驾驶员操作信号解析
将加速踏板角位移解析为目标车速,二者呈线性关系。解析函数为
(15)
式中:vd是由加速踏板角位移决定的整车目标车速;
vmax为最高车速;
αmax和α0分别为加速踏板最大角位移和自由行程。
本文研究履带车辆行进中转向(ρ≥0.5),将方向盘转角解析为车辆目标相对转向半径的倒数,二者呈线性关系。解析函数为
(16)
式中:ρd是由方向盘转角决定的目标相对转向半径;
φmax和φ0分别为方向盘最大转角和自由转角。
为了保证车辆转向过程中具备良好的机动性,采用差速式转向作为车辆行进中转向方式。根据式(13)—(16)可得两侧马达目标转速为
(17)
由式(17)可知,当车辆以较高车速进行小半径转向时,外侧马达目标转速会大于最大输出转速,为保证履带车辆行驶轨迹稳定,整车行驶控制单元需对车辆行驶控制目标进行修正,调整策略为:使外侧马达目标转速为马达最大输出转速,在保证车辆目标相对转向半径不变的情况下降低目标车速。调整后的目标车速为
(18)
综上可得目标车速表达式为
(19)
(20)
式中ωm,max为马达最大输出转速。
2.2 线性自抗扰马达转速控制器设计
LADRC中包含线性扩张状态观测器(linear extended state observer, LESO)和线性状态误差反馈控制律(linear state error feedback, LSEF)2个部分,为避免控制目标变化太快给系统造成冲击,可加入过渡过程。LESO的主要作用是利用系统的输入、输出数据观测系统各阶次的状态及总扰动,并通过LSEF对总扰动进行补偿,使系统简化为积分器串联标准型[13]。由静液驱动系统马达转速传递函数式(7)可知,被控对象为三阶系统,根据其特点设计的线性自抗扰马达转速控制器结构如图5所示,其中r为控制器参考输入,u0为比较信号。
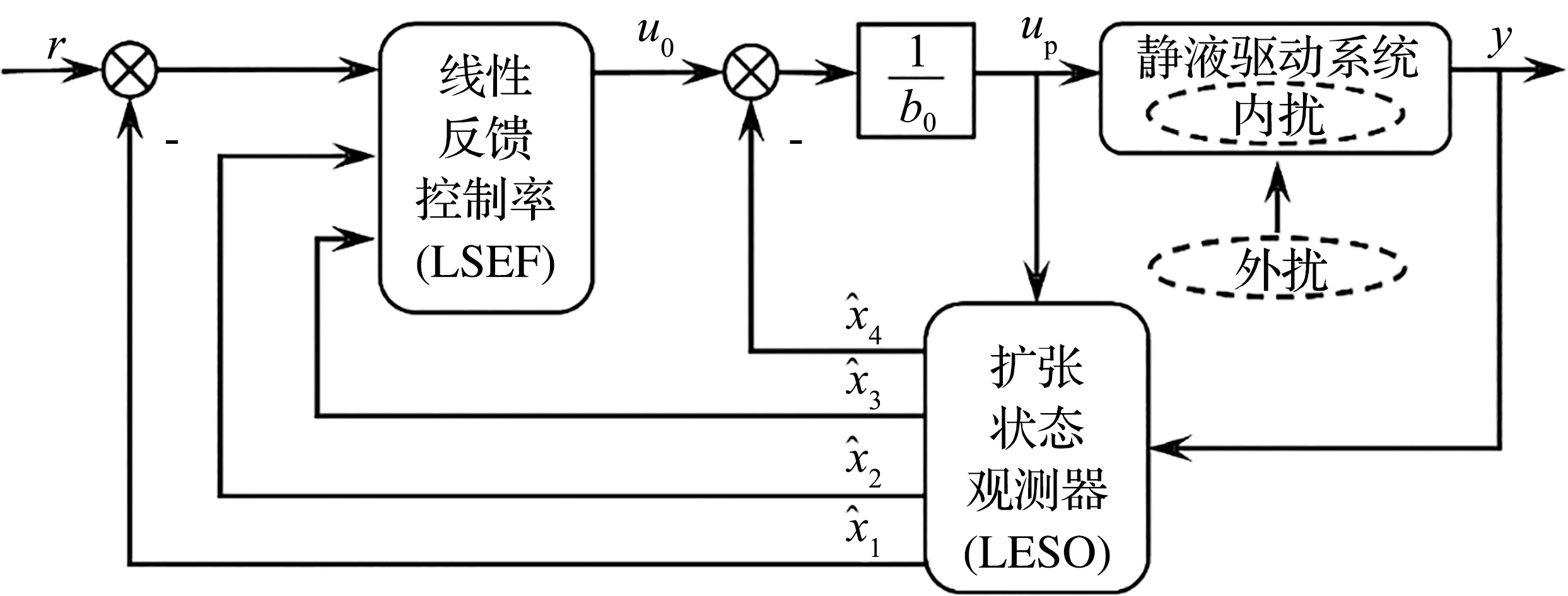
图5 马达转速控制器结构
式(7)并未考虑系统参数变化和未建模动态对系统输出的影响,将静液驱动系统中的参数变化和未建模动态归结为内扰动,而将作用于马达输出轴的时变负载和未知外力看作外扰动,这时式(7)可改写为
(21)
(22)
式中:函数fd是关于系统内扰和外扰的非线性函数,即系统的总扰动;
b0为控制量增益。将式(21)写成状态空间方程形式
(23)

对式(23)建立状态观测器,即LESO为
(24)

为保证LESO对系统状态的实时跟踪,基于极点配置法,可将线性扩张状态观测器特征多项式的根配置为重根,可得
det[λI-(A-LC)]=(λ+ωo)4,
(25)

设计线性状态误差反馈控制律(LSEF)为
(26)
(27)
式中:r为系统参考输入;
kp、kd1、kd2为控制律参数。忽略LESO估计误差,联合式(21)、(26)可得
(28)
由式(26)—(28)可以看出,LSEF在控制信号中利用总扰动估计值对系统给予补偿,将系统简化为积分器串联标准型,显著降低了总扰动对系统输出的影响,提高了系统鲁棒性。同样,基于极点配置方法,将系统(28)传递函数极点配置在同一位置-ωc处可得
s3+kd2s2+kd1s+kp=(s+ωc)3。
(29)
为避免马达转速跟踪过程中因期望值突变而导致系统产生冲击及超调,设计过渡过程为
(30)


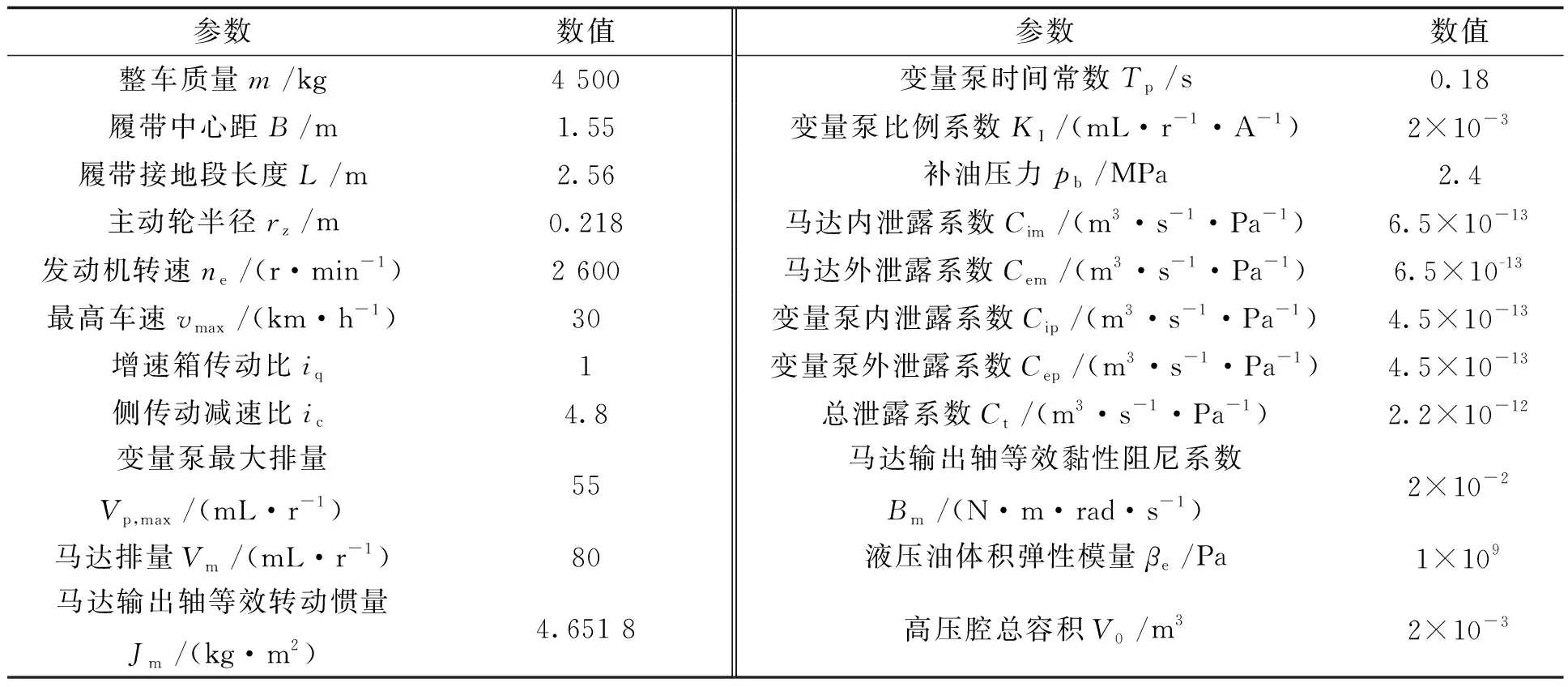
表1 车辆及传动系统仿真参数
3.1 直线加速、减速行驶工况
图6为直线行驶工况下车辆行驶速度跟踪曲线,图7为车速跟踪过程中液压泵排量比变化曲线。如图6所示,0 s时给定速度目标值为15 km/h,10 s时目标值上升至25 km/h,25 s时目标值为最高车速30 km/h,35 s时目标值减为20 km/h,其中默认路面为草地路面。为验证算法的抗扰动性能,在20~22 s期间路面条件由草地路面变为水泥硬路面,模拟马达负载变化;
在实际工作过程中,发动机负载发生变化时,其输出转速会产生一定的波动,在42~50 s时将发动转速加入不同幅值和频率的正弦波动信号以模拟系统参数变化,波动信号的幅值和频率如表2所示[17-19],图8、9分别为发动机不同转速波动下LADRC和PID车速控制曲线。

图6 车辆行驶速度跟踪曲线

表2 发动机转速波动参数

图8 发动机不同转速波动下LADRC车速控制曲线
由图6、7可知,在直线行驶工况下,2种控制算法均能实现目标车速的跟踪控制,但PID控制算法在车速跟踪过程中出现超调,且调节时间较长,同时在车辆加速或减速阶段,液压泵排量比变化波动明显,不利于马达动力输出的平顺性。与PID控制算法相比,LADRC控制算法可快速、无超调地跟踪目标车速,且整个过程中泵排量比变化平滑,无抖振现象,这主要是因为LADRC控制算法中设置了过渡过程,避免了跟踪过程中因初始误差过大而产生的超调。
此外,在系统参数变化和外部扰动存在时,LADRC比PID具备更好的自适应性和鲁棒性,系统抗干扰能力更强。图6中,在受到路面参数变化扰动时,PID控制下的速度变化范围为24.94~25.06 km/h,变化幅值0.12 km/h,而LADRC控制下的速度变化范围为24.96~25.04 km/h,变化幅值0.08 km/h,速度变化幅值降低了33.3%。在受到发动机转速变化扰动时,以图8、9中的工况1为例,PID控制下的速度变化范围为19.43~20.53 km/h,变化幅值1.1 km/h,LADRC控制下的速度变化范围为19.78~20.1 km/h,变化幅值0.32 km/h,速度变化幅值降低了71%。对比图8和图9可得,在不同幅值和频率的发动机转速波动下,LADRC控制下的车速波动幅值均小于PID控制下的;
当发动机转速波动消失时(50 s处),LADRC可快速控制车辆行驶速度收敛于目标车速,而PID控制下的车辆行驶速度调节时间较长。
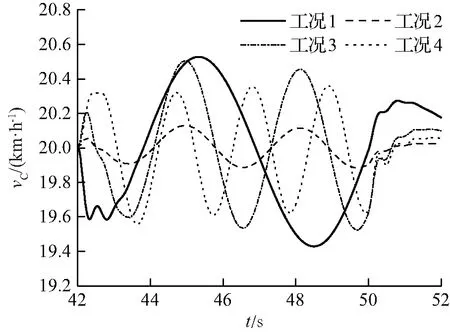
图9 发动机不同转速波动下PID车速控制曲线
3.2 不同车速下多半径转向工况
图10为车辆行驶速度跟踪曲线,图11为相对转向半径倒数跟踪曲线,图12、13分别为PID和LADRC控制下的马达输出转矩曲线。如图10、11所示:0~15 s车辆给定速度目标值为3 km/h,5~10 s进行半径为0.5B的原位转向;
15~30 s速度目标值为15 km/h,20~25 s进行2.5B半径转向;
30~50 s速度目标值为25 km/h,35~45 s进行10B半径转向;
50~70 s速度目标值为最高车速30 km/h,55~60 s进行20B半径转向。默认路面为草地路面,40~43 s期间路面条件由草地路面变为水泥硬路面,模拟外扰动。
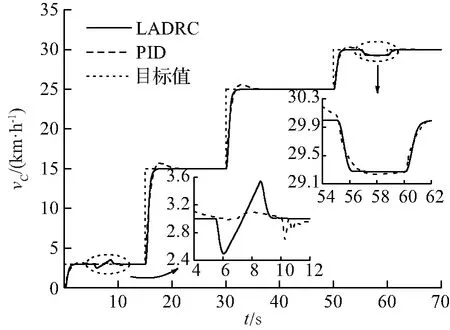
图10 车辆行驶速度跟踪曲线

图11 相对转向半径倒数跟踪曲线

图12 PID控制下马达输出转矩曲线
如图10、11所示,原位转向时,PID和LADRC控制算法均可使车辆跟踪目标相对转向半径,但车辆行驶速度均出现波动,虽然PID控制下的车速波动幅值较小,但波动时间较长。出现上述现象的主要原因是二者控制下的内侧马达制动转矩变化存在差异。
在较高车速条件下转向时,PID和LADRC控制算法均可使车速保持不变,但在跟踪相对转向半径时,PID控制算法不仅存在超调,而且调节时间较长,相比之下,LADRC控制算法可快速、准确地跟踪目标值,例如在15 km/h车速条件下以2.5B半径转向时,LADRC和PID控制的超调量分别为0和5.5%,调节时间分别为1.2 s和3.5 s。此外,在受到路面参数变化扰动时,LADRC控制算法产生的相对转向半径跟踪误差在幅值和持续时间上均小于PID控制算法。在30 km/h车速条件下以20B半径转向时,因外侧马达期望转速超出最大输出转速限制,整车行驶控制单元通过降低目标车速,实现车辆平稳降速转向,验证了整车行驶控制策略的有效性。
由图12可知,PID控制下的内侧马达开始时提供的制动转矩较小,约430 N·m,外侧马达输出最大驱动转矩,二者输出转速变化平稳,车速波动幅值较小;
随着马达转速跟踪误差的累积,内侧马达在积分控制作用下输出最大制动转矩,提供的再生功率在补偿外侧马达输出转速的同时使其输出转矩降低;
由于PID控制中积分控制动作慢,反应滞后,因此PID控制下车速波动时间较长。
由图13可知,LADRC控制下内侧马达初始制动转矩约519 N·m,使得其转速可快速减小并接近目标值,外侧马达受最大输出转矩限制,转速增加缓慢,使得车辆行驶速度在开始时降低;
随着内侧马达转速跟踪误差逐渐减小,其制动转矩开始减小,到达稳态时转矩值约为405 N·m,使得其转速降低缓慢,因此车辆行驶速度出现回升;
外侧马达因负载转矩较大,输出达到饱和值611 N·m,同时因控制器带宽固定,在转速变化缓慢且跟踪误差较小时,控制器输出变化量较小,使得马达转速调节相比PID控制更快。

图13 LADRC控制下马达输出转矩曲线
3.3 变速转向工况
图14为车辆行驶速度跟踪曲线,图15为相对转向半径倒数跟踪曲线。如图14、15所示:5~10 s车辆给定行驶速度为25 km/h,10~20 s匀减速至10 km/h,减速期间,10 s时开始15B半径转向,15 s时开始5B半径转向;
20~25 s车速保持10 km/h进行匀速转向;
25~35 s使车辆匀加速至25 km/h,加速期间,25 s时开始10B半径转向,30 s时开始5B半径转向;
35~40 s时车速保持25 km/h进行匀速转向。
如图14所示,由于静液驱动履带车辆本身具有较大的惯性,因此LADRC和PID在控制车辆跟踪时变目标车速时存在约0.7 s的延迟。在20~25 s和35~40 s期间,车辆由变速转向变为匀速转向,与PID控制算法相比,LADRC控制算法可更快地控制车速趋于稳定。图15中,变速转向时,LADRC控制算法依然可使车辆快速、准确地跟踪目标相对转向半径,但在相同转向时间内,PID无法控制车辆相对转向半径收敛至目标值。通过以上可以看出,LADRC控制算法在控制车辆转向时,能够更好地适应车速变化带来的影响,确保车辆在弯道行驶、越野等工况下行驶轨迹的可控性。

图14 车辆行驶速度跟踪曲线
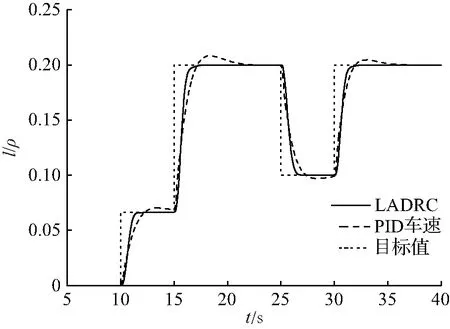
图15 相对转向半径倒数跟踪曲线
本文建立了基于马达转速调节的静液驱动履带车辆行驶控制策略,采用LADRC控制算法对马达转速进行闭环控制。仿真结果表明:所设计的控制策略在不同行驶工况下可精确实现驾驶员操作意图。与传统PID控制算法相比,LADRC控制算法在跟踪车辆行驶控制目标时响应速度更快,无超调,同时系统抗干扰能力强,跟踪精度高,液压泵输出流量及马达转矩变化平稳。该控制策略适用于具备参数时变和负载扰动的静液驱动履带车辆行驶控制。
猜你喜欢 履带控制算法马达 基于模型预测控制算法的智能密度控制系统在选煤厂的应用选煤技术(2022年2期)2022-06-06基于Backstepping的非线性无人船航向控制算法湖北工业大学学报(2021年2期)2021-04-28基于滑移条件下的履带车辆剪切位移特性试验研究兵器装备工程学报(2021年3期)2021-04-09不能怪我作文周刊·小学三年级版(2020年24期)2020-07-17高精度位置跟踪自适应增益调度滑模控制算法北京航空航天大学学报(2017年1期)2017-11-24ABS自动优化控制算法及应用汽车文摘(2016年11期)2016-12-08枰中侠侣棋艺(2016年4期)2016-09-20履带起重机行走振动特性研究科技视界(2014年6期)2014-12-24向阳坡当代(2009年3期)2009-05-25履带ABC坦克装甲车辆(2000年6期)2000-06-13






