四旋翼无人机参数预测和抗扰动自适应轨迹跟踪控制
时间:2023-06-25 21:10:03 来源:雅意学习网 本文已影响 人 
司 勇, 王兆魁, 李东方, 吴 奇
(1.清华大学 航天航空学院,北京 100084;
2.福州大学 电气工程与自动化学院,福建 福州 350108;
3.上海交通大学 电子信息与电气工程学院,上海 200230)
四旋翼无人机是一种通过遥控或机载程序实现飞行任务的无人驾驶设备。这种无人机凭借机动灵活、成本低和结构简单等优点在电力巡检、农业植保和环境监测等领域被广泛使用[1]。因此,四旋翼无人机的研究受到广大研究学者们的青睐[2-3]。
当前,四旋翼无人机的研究高度发展,研究学者们取得了颇丰的成果[4]。比较有代表性的有Draganflyer Innovation公司研发的Draganflyer系列四旋翼无人机飞行器,这种无人机在军事侦察、地质灾害测绘等领域发挥着重要作用[5-6],操作人员可远程遥控飞行器的运动方向和速度来完成指定任务。洛桑联邦理工学院研发了两代小型四旋翼无人机 OS4和OS4Ⅱ,设计了完全自主的无人机控制系统,赋予了无人机在室内的悬停功能,提高了无人机的自主避障能力[7-10]。Kumar等研究了四旋翼无人机的编队协同控制,这使得无人机群编队在特定场景中能够完成搜索和救援任务[11-13]。
由于四旋翼无人机在飞行过程中会受到紊流风场的影响,这给无人机的轨迹跟踪运动带来了极大的挑战[14]。Chen等[15]使用PID神经网络控制算法设计了四旋翼无人机的轨迹跟踪控制器,这种控制器没有考虑风场扰动对无人机路径跟踪的影响。一旦风力扰动过大,无人机就会偏离约定轨迹。为了提高四旋翼无人机在紊流风场扰动下的轨迹跟踪稳定性,Moreno-Valenzuela等[16]提出了一种基于分布式 PID 神经网络的无人机路径跟踪控制方法,该方法采用双闭环控制方案,在一定程度上提高了无人机的轨迹跟踪稳定性等。为了提高无人机路径跟踪的收敛速度,Mian等[17]将反步法应用在四旋翼无人机上并取得良好的效果[17]。此外,Chen等[18]将反步控制与滑模控制相结合,设计了一种具有鲁棒性的四旋翼无人机位置和偏航角控制的反步滑模控制器。该控制器使用了虚拟控制输入,设计了系统故障的估计值,保证了飞行器的轨迹跟踪性能。为了提高四旋翼无人机的轨迹跟踪精度,Allahverdy等[19]将迭代学习控制应用于无人机的路径跟踪控制中,提出了基于迭代学习控制的反步积分滑模控制方法,该方法有效提高了系统的控制精度和误差的鲁棒性。
针对四旋翼无人机模型的非线性特点,Raffo等[20-21]设计了无人机跟踪位置误差的积分预测控制器,这种控制器能够使无人机在受到持续外界干扰时仍然可以跟踪参考路径。但是,由于积分作用缓慢,无人机在高速风场扰动情况下的跟踪效果并不理想。为了解决这个问题,Yao等[22]提出了基于扩展状态观测器的四旋翼无人机积分滑模控制器,该控制器利用扩展状态观测器对风场的扰动变量进行估计,并用估计值来补偿自适应积分滑模面,有效提高了无人机的跟踪效率。类似地,Shao等[23]设计了基于扩展状态观测器的四旋翼无人机积分反步滑模的控制器,提高了无人机的抗扰动能力,保证了无人机系统在参数不确定情况下的轨迹跟踪精度。为了提高四旋翼无人机在轨迹跟踪过程中的自适应能力,Modid等[24]将自适应方法应用到滑模控制中,研究了无人机系统在参数不确定情况下的整定问题,证明了无人机系统的未知参数在任何时刻都可以实现收敛与稳定。
尽管研究学者们在四旋翼无人机的轨迹跟踪控制研究中取得了许多重要成果,但是还存在一些亟需解决的问题。例如,四旋翼无人机的姿态和位置的高耦合性会导致无人机自主化水平低的问题;
无人机在飞行控制中受气流、风阻和执行器故障等外界环境的扰动会导致轨迹偏离的现象;
控制系统的自适应能力研究不完善会导致无人机飞行效率低、抖振严重和稳定性不足的问题[25-26]。
为了提高四旋翼无人机的轨迹跟踪精度,抵消飞行过程中的干扰波动,增加控制系统的自适应性和稳定性,笔者提出一种基于滑模控制的四旋翼无人机参数预测和抗扰动的自适应轨迹跟踪控制器。所提出的控制器通过对四旋翼无人机系统的不确定状态参数进行预测,提前对无人机给予自适应补偿,有效提高了无人机的轨迹跟踪效率和跟踪精度,确保了自适应轨迹跟踪控制器的稳定性;
通过预测四旋翼无人机所受的外界扰动,提前对系统的控制输入进行干扰补偿,降低了气流、风阻和执行器故障等外界环境对无人机轨迹跟踪控制的消极影响,提高了无人机的抗扰动能力,消除了无人机在飞行过程中的抖振现象,从而提高了系统对环境的自适应适应力。通过实验,比较了四旋翼无人机在不同控制器作用下的轨迹跟踪性能曲线,验证了所提出的控制器能够消除四旋翼无人机的姿态角误差的超调现象,减小位置误差的波动峰值和频率,有效提高了无人机飞行速度的稳定时间和跟踪误差的收敛稳定性。
四旋翼无人机是一种典型的欠驱动六自由度系统。这种无人机由4个独立的电机和4个螺旋桨组成。通过调节四旋翼无人机的4个电机的转速,螺旋桨产生的升力会随之改变,以此实现无人机的飞行姿态转换。由于四旋翼无人机使用反对称结构的设计理念,因此无人机相邻的2个螺旋桨始终保持反方向旋转[27]。
四旋翼无人机的建模使用2套独立的空间坐标系,分别为惯性坐标系OXYZ和无人机坐标系Bxyz。无人机在OXYZ坐标系下的位置为[x,y,z]T,翻滚角为φ,俯仰角为θ,偏航角为ψ,如图1所示。四旋翼无人机系统的4个控制输入为ui(i=1,…,4)。其中,u1控制无人机的垂直起降运动,u2控制无人机的翻滚运动,u3控制无人机的俯仰运动,u4控制无人机的偏航运动。系统包括6个输出,分别是沿3个坐标轴的平移运动(垂直运动、前后运动、侧向运动)以及围绕3个坐标轴的旋转运动(翻滚运动、俯仰运动、偏航运动)。Ωi为第i(i=1,…,4)个电机的转速。参考文献[18],得到四旋翼无人机的非线性力学模型,如式1所示。

图1 四旋翼无人机模型
(1)
式中:kφ、kθ和kψ分别为四旋翼无人机在3个转动方向上的气动阻力系数;
kx、ky和kz分别为无人机在3个坐标方向上的空气阻力系数;
Ir=Ω1-Ω2+Ω3-Ω4为螺旋桨角速度的综合残差;
Ix、Iy和Iz分别为四旋翼无人机围绕机体坐标系的转动惯量;
l为无人机旋翼中心至机体坐标系原点的距离。
为简化四旋翼无人机的模型参数,设

设计无人机在x、y、z方向上的虚拟控制输入为
(2)
由于欠驱动的四旋翼无人机存在非线性项和耦合项,因此四旋翼无人机系统在本质上是一个不稳定系统。无人机在轨迹跟踪的过程中不仅受到建模不确定性影响,而且受到外界风扰和故障等影响。因此,研究四旋翼无人机在受到外部干扰以及故障影响下的轨迹跟踪方法具有重要意义。
为了抵消四旋翼无人机在轨迹跟踪过程中受到的干扰和故障,需要将外界干扰和偏差故障统一成系统的扰动项,并在控制器中引入扰动补偿项,通过自适应估计方法来确保控制器的稳定性[28]。设置fi(i=1,2,3)为四旋翼无人机在转动角度上所受的故障项。σi(i=1,2,3)为无人机在转动角度上所受的扰动项。四旋翼无人机的转动角度故障项和扰动项之和为biΔi=fi+σi(i=1,2,3)。设置hi(i=1,2,3)为四旋翼无人机在运动位置方向上所受的故障项,δi(i=1,2,3)为无人机在运动位置方向上所受的扰动项,则无人机的运动位置故障项和扰动项之和为Δi=hi+δi(i=4,5,6)。因此,考虑扰动以及执行器偏差故障的无人机控制模型为
(3)
式中:vφ为滚转角速度;
vθ为俯仰角速度;
vψ为偏航角速度;
vx为切向运动速度;
vy为法向运动速度;
vz为垂向运动速度。
四旋翼无人机在轨迹跟踪的过程中,需要完成两项控制目标,分别是姿态角目标和飞行位置目标[29]。四旋翼无人机的姿态角目标和飞行位置目标之间存在相互作用和相互联系。其中,姿态角目标的实现可以使无人机的翻滚角、俯仰角和偏航角误差收敛且稳定;
飞行位置目标的实现可以使无人机的切向、法向和垂向位置误差收敛且稳定[30-31]。由于四旋翼无人机的姿态和位置之间具有高度的耦合性,因此,姿态角的稳定性会影响无人机的飞行位置轨迹,飞行位置的收敛速度会反作用姿态角的转动角度。只有同时完成自适应轨迹跟踪控制器的两项目标才能使无人机快速和准确地跟踪期望轨迹。
2.1 姿态角目标

(4)

2.2 飞行位置目标
(5)

为了实现制定的控制目标,需要利用滑模控制方法和自适应控制方法对四旋翼无人机的姿态角子系统和位置子系统分别设计[32]。
3.1 姿态角子系统
(6)

对四旋翼无人机的翻滚角误差,俯仰角误差和偏航角误差进行为微分:
(7)

根据自适应控制方法设计系统的控制输入u2,u3和u4:

(8)
式中:cφ>0,cθ>0和cψ>0为正常数增益。
设计Lyapunov候选函数L1、L2和L3:
(9)
式中:γi>0(i=1,…,11)为正常数增益;
β1,β2和β3为正常数增益。


(10)
对L1、L2和L3进行微分可以得到:
(11)

考虑具有外部扰动的四旋翼无人机的姿态子系统所设计的控制输入(式(8))能够保证无人机姿态子系统在扰动发生的情况下保持稳定,故四旋翼无人机系统的姿态角度误差eφ、eθ和eψ可以收敛且稳定。
3.2 位置子系统
(12)
设置虚拟控制项为
(13)


(14)
式中:η1>0,η2>0和η3>0为正常数增益。
设置系统的控制输入u1为
(15)
式中:cz>0为正常数增益。


(16)
设置虚拟控制项为
(17)


(18)
式中:η4>0,η5>0,η6>0,η7>0,η8>0和η9>0为正常数增益。
设置系统的位置控制输入ux和uy为
(19)
式中:cx>0和cy>0为正常数增益。

设四旋翼无人机的位置误差的Lyapunov函数为
(20)

(21)
(22)

下面通过仿真实验来验证所提出的控制器可以使四旋翼无人机快速并准确的跟踪期望路径。在仿真实验中,系统的初始参数如表1所示。
四旋翼无人机跟踪的期望轨迹如式(23)所示,无人机的姿态子系统的扰动变量如式(24)所示,位置子系统的扰动变量如式(25)所示。通过分析无人机在本文所提出控制器(简称PC)、文献[18]提出的反步滑模控制器(Backstepping Sliding Mode Controller,BSMC)、标准反步控制器(Standard Backstepping Controller,SBC)和文献[24]提出的自适应滑模控制器

表1 参数设置
(Adaptive Sliding Mode Controller,ASMC)下的跟踪性能曲线,验证所提出的控制器的有效性和优越性。
(23)
Δ1=Δ2=Δ3=cos(0.5t+0.1)
(24)
Δ4=Δ5=Δ6=sin(t+0.1)
(25)
四旋翼无人机在4种不同控制器作用下的飞行轨迹如图2所示。无人机在SBC下的运动轨迹与参考轨迹在起始阶段偏离最大。无人机在BSMC、ASMC和PC下的飞行轨迹都可以快速跟踪到理想路径。但是,相比之下,PC的作用可以使四旋翼无人机最快、最稳定地跟踪参考轨迹。
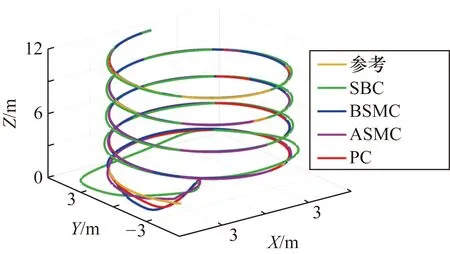
图2 无人机飞行轨迹
四旋翼无人机在4种控制器作用下的飞行轨迹如图3所示。将无人机的飞行轨迹与参考路径作差,得到无人机的飞行位置误差如图4所示。无人机在BSMC、ASMC和PC作用下的切向和法向飞行轨迹可以跟踪到期望路径。在PC作用下的切向和法向位置误差可以迅速收敛。在BSMC、ASMC和PC作用下,无人机的切向位置误差的收敛时间分别是4 s、4 s和1 s,法向位置误差的收敛时间分别是4 s、6 s和1 s。在ASMC和PC作用下的垂向位置误差可以无超调的快速收敛到稳定状态。综上所述,通过对比四旋翼无人机在不同控制器作用下的飞行位置特性,体现出了PC的优越性和有效性。

图3 无人机飞行轨迹分量

图4 无人机飞行位置误差
四旋翼无人机的飞行速度误差如图5所示。可以看出,无人机在PC作用下的切向和法向速度误差可以在1s内快速收敛,并且收敛后的误差曲线具有极高的稳定性和平滑性。此外,四旋翼无人机在BSMC、SBC、ASMC和PC作用下的垂向速度误差在稳定前分别经过的超调次数为2次、2次、1次和1次,误差的收敛时间分别是14 s、14 s、4 s和2 s。因此,四旋翼无人机在PC的控制下的飞行速度误差不仅收敛快、稳定性好,而且收敛后的误差曲线平滑。

图5 无人机飞行速度误差分量


图6 无人机飞行速度
将无人机的飞行姿态角与参考姿态角作差,得到无人机的飞行姿态角误差,如图7所示。相比之下,四旋翼无人机在PC下的翻滚角和俯仰角误差在初始阶段虽然出现一定的抖动现象,但是抖动幅值小、稳定性好。此外,虽然四旋翼无人机在不同控制器作用下的偏航角误差都实现了稳定,但是,无人机在PC下的偏航角误差曲线在稳定前的摆动幅值小,收敛速度快,收敛后的误差曲线稳定性好。综上所述,四旋翼无人机的飞行姿态角特性曲线可以很好地体现出PC的优越性。
四旋翼无人机的飞行姿态角速度误差如图8所示。可以看出,无人机在BSMC和SBC作用下的翻滚角和俯仰角速度误差存在抖动幅度大、抖动频繁、收敛速度慢的不足。相比之下,无人机在ASMC和PC作用下的翻滚角和俯仰角速度误差曲线具有抖动频率小、抖动幅值小、收敛速度快和误差稳定性好的优点。在PC作用下,无人机的误差曲线整体波动小、抖动频率低、收敛速度快且平滑、姿态转动平滑,这大幅提高了无人机的轨迹跟踪稳定性。

图7 无人机飞行姿态角误差

图8 无人机飞行姿态角速度误差
无人机的系统控制输入曲线如图9所示。无人机在起飞时,垂直起降输入变化大,这使无人机可以快速跟踪参考轨迹。在PC的作用下,无人机快速跟踪到期望路径后,飞行位置误差和姿态角误差实现了收敛,无人机实现了稳定的轨迹跟踪运动,无人机的垂直起降输入也实现了稳定。受无人机初始作用的影响,无人机的偏航输入在8 s内振动剧烈,因为无人机在初始轨迹跟踪的过程中不仅要改变高度,而且要改变偏航位置。相比之下,无人机的翻滚输入和俯仰输入仅在3 s内发生大幅变化。当无人机跟踪到参考轨迹后,无人机的翻滚、俯仰和偏航输入呈现出规律的正弦波形式。
四旋翼无人机系统的参数变量预测值和虚拟控制函数的参数变量预测值变化曲线如图10和图11所示。在PC控制下,预测值曲线可以快速稳定,并且稳定后的曲线整齐无毛刺。

图9 控制输入

图10 系统的参数变量预测值

图11 虚拟控制函数的参数变量预测值
四旋翼无人机系统的姿态和位置扰动变量预测值变化曲线如图12和图13所示。由于初始扰动变量为正弦曲线,因此,在PC的作用下,无人机的扰动变量预测值为稳定的正弦波动形式。
综上所述,PC不仅有效提高了四旋翼无人机的轨迹跟踪效率,加快了跟踪性能误差的收敛速度,而且减小了跟踪误差的波动峰值,提高了系统的稳定性。通过仿真实验,所提出的基于滑模控制的四旋翼无人机参数预测和抗干扰的自适应轨迹跟踪控制器的有效性和优越性被验证。

图12 姿态扰动变量预测值
本文提出了一种基于滑模控制的四旋翼无人机参数预测和抗干扰的自适应轨迹跟踪控制器。定义了四旋翼无人机具有外部扰动的非线性力学模型,探讨了无人机轨迹跟踪的姿态角目标和飞行位置目标,通过预测系统的不确定状态参数和无人机所受的外界扰动,设计系统的姿态控制输入和位置控制输入,实现了无人机的自适应轨迹跟踪控制。
猜你喜欢旋翼滑模扰动Bernoulli泛函上典则酉对合的扰动数学物理学报(2022年4期)2022-08-22改进型自抗扰四旋翼无人机控制系统设计与实现北京航空航天大学学报(2021年9期)2021-11-02大载重长航时油动多旋翼无人机军民两用技术与产品(2021年9期)2021-03-09(h)性质及其扰动数学物理学报(2019年4期)2019-10-10基于STM32的四旋翼飞行器的设计电子制作(2019年9期)2019-05-30基于组合滑模控制的绝对重力仪两级主动减振设计中国惯性技术学报(2019年6期)2019-03-04PMSM调速系统的自学习滑模控制测控技术(2018年4期)2018-11-25并网逆变器逆系统自学习滑模抗扰控制测控技术(2018年3期)2018-11-25小噪声扰动的二维扩散的极大似然估计贵州师范学院学报(2016年3期)2016-12-01四旋翼无人机动态面控制北京航空航天大学学报(2016年8期)2016-11-16








