无人机搭载高分辨率传感器在精细地形监测中的应用
时间:2023-06-17 11:40:04 来源:雅意学习网 本文已影响 人 
程平平,吴坤鹏,肖乐天,雷东钰
(1.安徽师范大学 地理与旅游学院,安徽 芜湖 241008;
2.云南大学 国际河流与生态安全研究院,云南 昆明 650091;
3.中国科学院 西北生态环境资源研究院 冰冻圈国家重点实验室,甘肃 兰州 730000;
4.湖南科技大学 地球科学与空间信息工程学院,湖南 湘潭 411201)
地形是指地球表面的高低起伏形态,高程是描述地表起伏形态最基本的几何量[1],而数字高程数据则是对地形高程信息的数字化表达,在气候、气象、地形地貌、地质灾害、土壤和水文等各方面有广泛的应用[2-5]。因此,获取高精度的数字高程模型(Digital Elevation Model,DEM)具有重要意义,可以为灾害防治、工程建设及科学研究等提供重要的科学数据支撑。
遥感技术的发展推动了区域尺度乃至全球尺度的地形监测研究,并产生了多套数字高程模型数据[6-8]。目前基于遥感的DEM 获取方式主要分为三类,包括立体像对摄影测量、合成孔径雷达干涉测量和激光测高[1]。高分辨率光学立体像对近年来成为生产DEM 的主要数据源,如美国Terra ASTER、法国SPOT 系列、中国资源三号(ZY3)等[9-11],但光学立体像对数据获取易受云雾天气影响。合成孔径雷达干涉测量是一种主动对地成像系统,如美国SRTM DEM(Shuttle Radar Topography Mission)、欧空局TerraSAR-X/TanDEM-X[5-6]。微波遥感具有全天时、全天候及几乎不受云、雨影响的优势,但高精度的DEM 生成易受时间、空间去相关及大气延迟、轨道误差等影响。激光测高是指利用卫星平台搭载激光测高仪,向地面发射激光脉冲并接收回波信号,根据激光往返时间、卫星轨道等信息获取光斑高程的方法,如ICESat GLAS 和ICESat2 ATLAS[12-13]。三种方式均可实现大尺度的地形反演,但在反演精度、空间分辨率等方面仍有待提高。
随着社会经济的发展和科学技术的进步,精细地形监测需求越来越大,如局部区域滑坡或冰川跃动发生前夕,其后缘出现的裂隙发育过程[14-15]。在复杂山区,基于航天遥感的精细地形监测易受天气、地形等因素影响,难以获取高精度数字高程模型。近年来,随着无人机(Unmanned Aerial Vehicle,UAV)技术的不断完善,可以在不同空间尺度上连续获取高时空分辨率的影像[16-19]。无人机航测正射影像和数字表面模型(Digital Surface Model,DSM)能够很好的反映精细地形表面特征,在复杂山区具有广泛应用。中国西部发育大量海洋型冰川,当前利用无人机开展海洋型冰川研究,主要集中在年际尺度冰川变化或年内冰川变化过程,包括冰川末端进退、表面高程变化及表面运动速度[19-21],鲜少涉及冰川特征提取。如Yang 等[19]利用无人机获取了藏东南地区冰川积累期、消融期动态变化;
Wu 等[20]利用无人机开展海洋型冰川监测,分析了冰川表面形态的发育特征;
Immerzeel等[21]利用无人机监测喜马拉雅山地区冰川消融期动态变化,包括冰川物质平衡、运动速度,并分析了冰川表面形态对冰川消融的重要影响。航天遥感的冰川监测研究表明,高亚洲地区冰川普遍呈退缩且加速退缩趋势[9,22-23],其中以藏东南地区海洋型冰川最为显著[24-25]。冰川消融模型(度日模型、能量平衡模型)揭示高亚洲地区不同类型冰川对气候变化敏感性差异显著[26-28],而海洋型冰川表现为对气温变化最为敏感[29]。当前全球气候变暖背景下,海洋型冰川表面发育大量表碛、冰面湖、冰裂隙,而大量研究表明,冰川表面特殊形态对冰川变化研究有重要影响[30-33]。野外观测受地形和人力的限制,不足以开展区域尺度的冰川表面形态监测,而航天遥感受空间分辨率的限制,难以开展冰川表面形态的自动提取,因此利用无人机开展冰川区精细地形监测有重要意义。本文以藏东南岗日嘎布地区雅弄冰川末端为研究区,通过无人机摄影测量,获取复杂地形条件下精细地形,并提取冰川表面特殊形态,为冰川变化研究奠定基础,同时为山区精细地形监测研究提供借鉴。
岗日嘎布山位于青藏高原东南部,呈北西-南东向伸展(图1),山系北坡流域降水、冰雪融水等汇入雅鲁藏布江支流帕隆藏布,而南坡流域则汇入察隅曲[34-35]。印度洋季风带来的湿润水汽沿山系两侧从东南向西北深入,随着地形的抬升形成丰沛降水,加之该地区年均气温在-8.9~3.2 ℃之间,使得该地区发育大量海洋型冰川[36-37]。

图1 岗日嘎布地区及雅弄冰川地理位置,底图为Landsat8影像(波段组合B654)(a);
雅弄冰川末端无人机POS及航线分布,底图为Planet影像(波段组合B432)(b)Fig.1 Overview of the Kangri Karpo Mountains and Yanong Glacier,with background of Landsat OLI image(B654)(a);
POS and Route of UAV at the terminal of the Yanong Glacier,with background of Planet image(B432)(b)
最新研究表明,2015 年岗日嘎布地区现有冰川1 166条,面积2 048.5 km2,平均冰川规模1.76 km2[38]。1980—2015 年间,该地区冰川面积减少了24.91%,物质平衡为(-0.46±0.08)m w.e.·a-1,且物质平衡呈加速亏损趋势、表面运动速度呈减速趋势[39-40]。其中该地区最大的海洋型冰川——雅弄冰川(面积173.0 km2,长31.1 km),过去40 年间面积减少速率为0.30%·a-1,物质平衡为(-0.65±0.22)m w.e.·a-1,最大冰川运动速度可达到(~660±25)m·a-1[39-40]。
2.1 无人机航测
由于藏东南地区雅弄冰川末端地形复杂、航天遥感数据难以满足高精度地形分析,本研究对冰川末端开展无人机摄影测量。本研究使用大疆创新科技有限公司(DJI)M300 RTK(M3R)无人机,并配备睿铂M6 Pros(M6P)量测型相机。该相机传感器尺寸35.7 mm×23.8 mm,镜头焦距40 mm,相机总像素6 100 万,配备三轴增稳平台,既可以用于生产正射图像,也可以用于近景摄影测量建立高质量精细化模型。在飞行高度设置为160 m 时,该传感器获取的正射影像地面分辨率约为1.50 cm·pixel-1。
本研究于2022 年7 月31 日在藏东南地区雅弄冰川末端开展了2个架次飞行,采用仿地飞行方式,通过WaypointMaster 软件,矢量化航测范围,并导入ALOS 12.5 m 分辨率DEM,航高设置为160 m,航向与旁向重叠90%,生成仿地航线。通过将仿地航测导入遥控设备,并上传至无人机航测系统,以开展无人机自动航测。由于冰川末端地形复杂,地面像控点难以布设,因此本研究采用无像控点航测(图1)。
2.2 数据处理
M3R+M6P 航测任务完成后,共获取有效图像384 幅。首先通过SkyScanner 软件下载相机自带POS 数据,将POS 信息写入航拍照片,并生成ContextCapture 建模软件可识别的工程区块索引。然后通过ContextCapture 进行航拍图像建模,包括空中三角测量、影像密集匹配、正射校正与镶嵌、数字表面模型(Digital Surface Model,DSM)构建等。首先对多视影像联合平差,结合POS 系统提供的外方位元素,提取同名特征点,建立区域网平差误差方程,解算相片的外方位元素。在获取每张相片的外方位元素同时,生成密集点云,基于空三成果和密集点云,构建三维TIN。依据三维TIN 位置信息,匹配最佳视角相片,完成地面实景三维建模。具体流程如图2,最终得到坐标系WGS-84、地面分辨率为1.5 cm的正射影像和DSM[20]。

图2 无人机航测及数据处理流程Fig.2 Flow of UAV aerial survey and data processing
2.3 误差分析
由于采用无像控点航测方式,航测获取的正射影像和DSM 不确定性评估主要针对无人机飞行姿态(照片自身位置)和影像匹配。基于384幅有效图像的空中三角测量,估算了每一幅图像获取时相机位置误差,在X方向平均误差为1.5 cm、Y方向平均误差为1.36 cm、Z方向平均误差为0.33 cm。在影像密集匹配过程中,共生成269 087 个连接点,通过连接点将图像匹配,并估算了每幅图像所使用的连接点重投影误差,平均误差为0.51个像元(图3)。
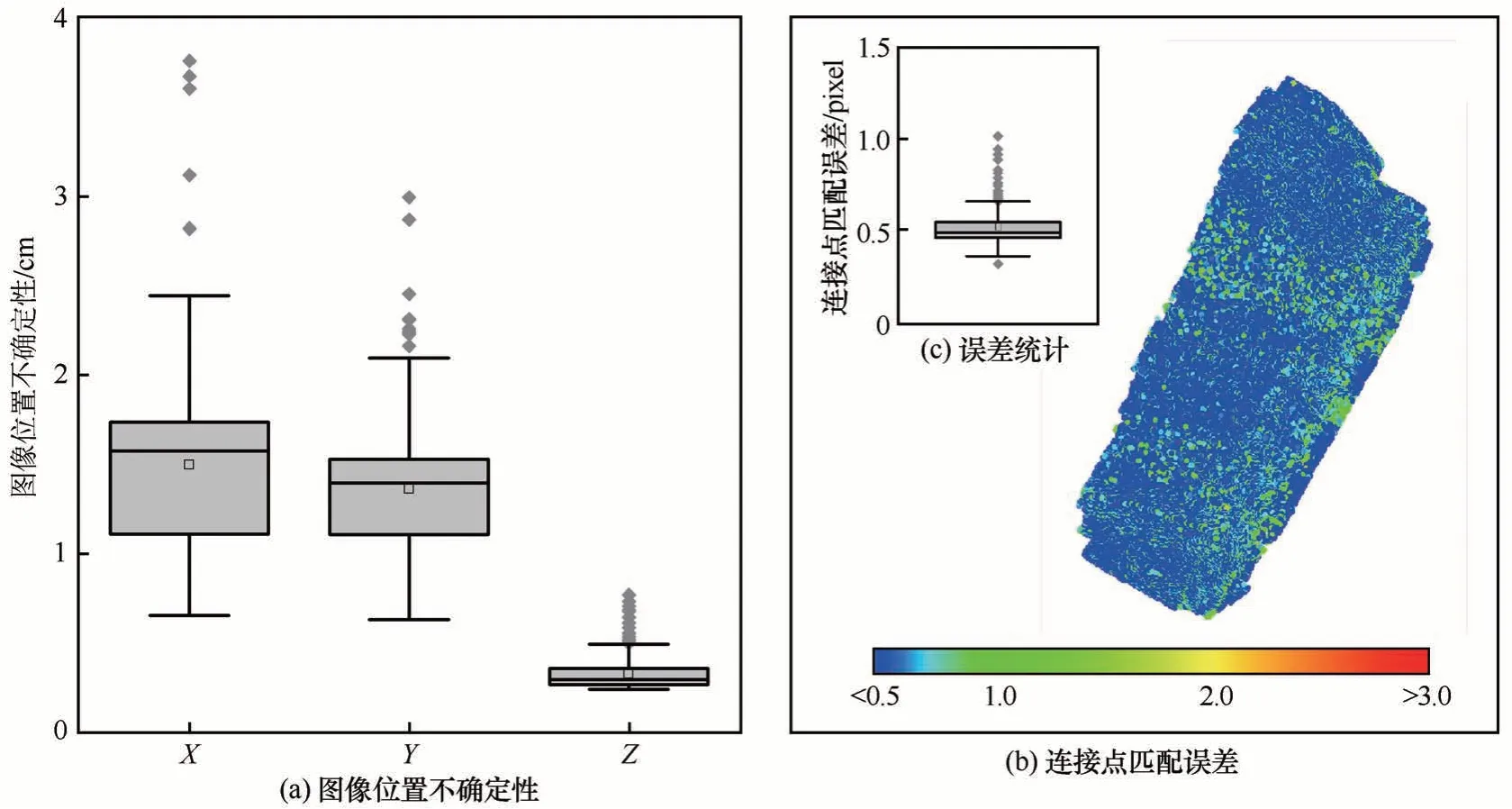
图3 无人机摄影测量误差:图像位置不确定性(a),连接点匹配误差(b),连接点匹配误差统计(c)Fig.3 Uncertainties of UAV aerial survey:photo position uncertainties(a),RMS of Reprojection Error(b),statistic of photo position uncertainties(c)
3.1 无人机航测影像
利用M3R 无人机搭配睿铂M6P 量测型相机、POS 处理软件SkyScanner、空三解算软件Context-Capture,得到了地面分辨率为1.5 cm的正射影像及DSM(图4)。

图4 无人机获取的正射影像、DSM及冰面发育的冰裂隙、冰崖、冰面湖Fig.4 Orthoimage and DSM acquired by UAV,and crevasse,ice cliff and glacial lake
正射影像显示,航测区面积3.7 km2,其中冰川区面积2.35 km2,占整个测区面积的63.5%。冰川区表面形态呈条带状,表碛与裸冰相间分布。在裸冰区,冰面形态较为单一,有少量冰裂隙和冰面湖发育。在表碛覆盖区,由于表碛的差异消融作用,大量冰裂隙、冰崖、冰面湖发育。DSM 显示,冰川区表面地形较为平缓,但由于表面形态差异显著,地形起伏纹理较为清晰;
从冰川区到两侧基岩,地形显著抬升,对冰川发育及其运动有较强的限制作用。
3.2 与航天遥感影像对比
本文选取了高分辨率遥感影像Planet和数字高程模型TanDEM,以对比航天遥感与无人机航测在冰川表面形态、精细地形方面的表达差异。
Planet 影像包含红绿蓝和近红外四个波段,空间分辨率3 m,时间分辨率可达到1 天,本文选取了离无人机航测时间(2022 年7 月31 日)最近的无云Planet 影像(成像时间2022 年7 月25 日)。Planet 影像可有效的区分裸冰与基岩相接触部位,但当冰川被表碛覆盖,与基岩表现出非常相近或几乎一致的光谱特征、纹理结构,便难以获取冰川边界。且由于地物光谱的相似性,Planet 影像在识别冰川表面形态存在一定困难。而无人机其高时空分辨率,在获取冰川边界、冰川表面形态上具有较大优势。
TanDEM 是利用2014 年3 月13 日获取TerraSAR-X/TanDEM-X 影像,通过合成孔径雷达干涉测量(Interferometric Synthetic Aperture Radar,In-SAR)得到的空间分辨率12 m 的数字高程模型。TanDEM 获取时间与无人机航测时间不同,由于海洋型冰川对气候变化敏感,两个时期获取的冰川地形有较大差异,因此本文仅对比TanDEM 与DSM对精细地形的表达能力。本文选定了一条冰川区横向剖面线PP′,以提取冰川区地形剖面[图5(a)]。TanDEM 的PP′地形剖面显示,两侧无冰区高程呈连续、快速降低现象,而冰川区高程波动较小[图5(b)]。DSM 的PP′地形剖面显示,两侧无冰区高程与TanDEM 的PP′剖面呈相同规律,但在冰川区,高程有较为显著的波动,冰川地形相对复杂[图5(c)]。对高程波动较显著的区域,通过检查航测正射影像和DSM发现,该区域有大量表碛、裂隙发育,由于表碛、裂隙的差异消融,导致该区域地形起伏显著。由此可知,相对于航天遥感获取的TanDEM,无人机航测DSM 能够准确表达冰川区精细地形特征。

图5 航测区基岩高程变化(a)及冰面剖面高程起伏:TanDEM(b)、DSM(c)Fig.5 Elevation changes in bedrock(a)and elevation fluctuation in glacier surface along profile P-P′ with TanDEM(b)and DSM(c)
与此同时,本文还基于TanDEM 和DSM提取了航测区地面坡度。从坡度的空间分布来看,由于两侧无冰区为连续基岩,破碎程度较低,两种数字高程模型在两侧无冰区所表达的整体坡度特征较为一致;
而在冰川区,两种数字高程模型所表达的坡度特征呈显著差异。TanDEM 提取的坡度显示冰川区地形起伏较为平缓,不足以说明因差异消融带来的地形破碎程度。DSM 提取的坡度显示,在裸冰区地形起伏平缓,在表碛、冰裂隙发育区域地形起伏剧烈。与同期正射影像对比发现,高坡度集中分布于冰裂隙、冰崖处(图6),因此无人机航测DSM 能够用于精细地形分析。

图6 航测区冰川表面坡度及其表面形态Fig.6 Surface slope and characteristics in surveyed area
3.3 冰面特殊形态提取
有研究表明,冰川表面特殊形态在冰川变化、冰川灾害等研究中有重要作用,如冰面湖的发育对冰川消融有显著作用、冰川跃动前期有冰裂隙扩张现象等[30-33]。本文对DSM 数据分析表明,冰裂隙、冰崖在坡度图上呈显著特征,可利用坡度阈值进行提取。冰面湖在正射影像上有显著呈现,但由于正射影像仅是RGB(红绿蓝)成像,不具有光谱信息,本文拟通过RGB成像波段提取冰面湖。
3.3.1 冰裂隙
对正射影像及DSM 的目视分析,冰裂隙主要分布在裸冰区,且冰裂隙处呈现较大坡度。对比分析发现,冰裂隙处坡度均大于60°。本文选取裸冰区为试验区,通过坡度阈值法(slope>60°)获取试验区冰裂隙初步分布栅格图像。由于裂隙宽度远大于无人机航测数据地面分辨率,无人机航测获取的DSM 在裂隙中间位置表现较为平坦,通过坡度阈值法不足以提取完整裂隙分布。由于冰裂隙对光线的吸收作用,在裂隙中间位置正射影像成像较暗,对比RGB成像波段发现,红色成像波段在冰裂隙中间位置数值较低,利用R 成像波段阈值法(R<50)可有效提取冰裂隙中间位置栅格图像。坡度阈值法和R成像波段阈值法相结合,并辅以人工目视检查,即可提取完整裂隙分布(图7)。为评估自动提取的冰裂隙精度,人工目视解译了部分裂隙分布,对比发现,自动提取的冰裂隙精度可达到90%。

图7 利用坡度阈值法与R成像波段阈值法提取冰裂隙:正射影像(a),坡度(b),坡度大于60°的栅格分布(c),R成像波段(d),R成像波段灰度值小于50的栅格(e),图7(c)与7(e)栅格集合(f)Fig.7 Ice cliff extraction by slope threshold and Red band threshold:orthoimage(a),slope(b),the raster of slope larger than 60°(c),Red band(d),the raster of Red band smaller than 50(e),the combination of slope threshold and Red band threshold(f)
从冰裂隙分布特征可以看出,冰裂隙均是垂直于冰川主流线横向发育。航测区山谷形态限制冰川运动方向,加之雅弄冰川运动速度较快,使得大量裂隙横向发育。裂隙长度差异显著,最长裂隙可达到约90 m,最短裂隙仅约2 m;
裂隙宽度没有显著差异,呈现0.5~3.0 m 宽。对试验区及发育的冰裂隙统计分析,冰裂隙分布密度可达到8.44%(冰裂隙面积/试验区面积)。
3.3.2 冰崖
对正射影像及DSM 的目视分析,冰崖主要分布在表碛覆盖区,且具有较大坡度。对比分析发现,冰崖平均坡度大于40°。本文选取表碛覆盖区为试验区,通过坡度阈值法(slope>40°)获取试验区冰崖初步分布栅格图像。由于无人机航测数据分辨率较高,较大表碛周边存在坡度大于40°的区域。相对表碛区发育的冰崖,较大表碛周边区域规模较小,且分布不连续。利用50×50滤波窗口,并辅以目视检查,可有效剔除较小的孤立像元,获取冰崖分布(图8)。

图8 冰崖的提取Fig.8 Ice cliff extraction by slope threshold:orthoimage(a);
the distribution of ice cliff(b)
通过对比人工目视解译试验区部分冰崖,坡度阈值法提取的冰崖误差小于10%。由于无人机航测正射影像不具备光谱信息,不足以利用冰崖与表碛对不同光谱的反射、吸收作用提取冰崖分布。因此,为提高冰崖提取精度,宜采用无人机搭载多光谱传感器。对试验区及发育的冰崖统计分析,冰崖分布占比达到7.78%(冰崖面积/试验区面积)。
3.3.2 冰面湖
对正射影像RGB 成像波段的目视分析,由于对光线的吸收作用,冰面湖在R 成像波段上与其他地物有显著差异。本文选取了冰面湖集中发育区为试验区,通过R 成像波段阈值法(R<100)开展冰面湖提取实验。首先阈值分割,提取R 成像波段小于阈值的栅格;
然后栅格转矢量,将小于阈值的栅格重分类,并将栅格转为矢量;
最后验证检查,通过人工目视检查,删除非冰面湖矢量,得到冰面湖分布(图9)。

图9 冰面湖的提取Fig.9 Glacial lake extraction by Red band threshold and manual
试验区共发育四个冰面湖,通过人工目视矢量化得到湖面积657.28 m2,阈值法自动提取的湖面积达609.79 m2,提取误差为7.2%。由于水质差异、湖深差异,单一阈值提取的不同冰面湖,其误差有所差异,但总体误差小于10%(表1)。
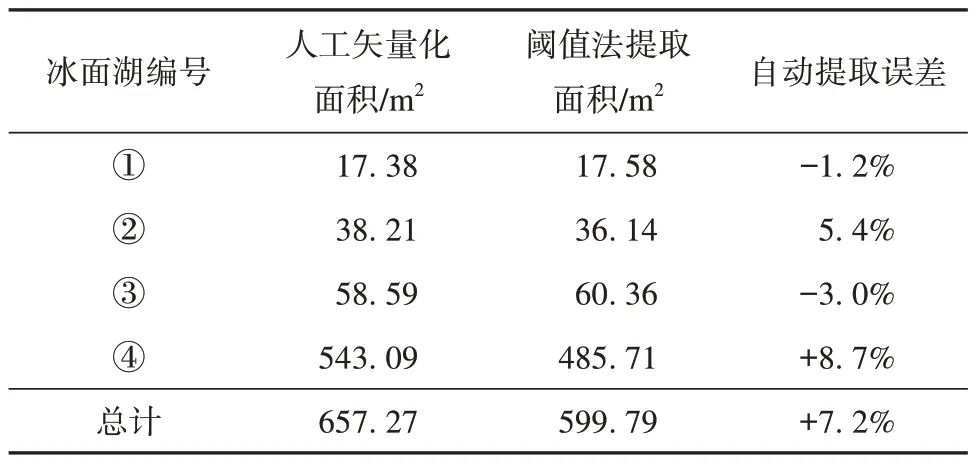
表1 冰面湖面积及其误差Table 1 The area and uncertainty of glacial lake
无人机航测正射影像和数字表面模型能够很好的反映精细地形表面特征,在复杂山区具有广泛应用。本文利用M3R 无人机搭配睿铂M6P 量测型相机、POS 处理软件SkyScanner、空三解算软件ContextCapture,得到了地面分辨率为1.5 cm 的正射影像及DSM,能够较好的呈现冰川区表面形态和地形特征。相比较于高分辨率遥感影像Planet、数字高程模型TanDEM,无人机航测正射影像、DSM在获取冰川边界、冰川表面形态上具有较大优势,能够准确表达冰川区精细地形特征。
当前利用无人机开展海洋型冰川研究,主要集中在年际尺度冰川变化或年内冰川变化过程,包括冰川末端进退、表面高程变化及表面运动速度,鲜少涉及冰川特征提取[18-20]。本文利用坡度阈值法、R成像波段阈值法,能够有效提取冰裂隙、冰面湖的分布,且自动提取误差小于10%。但由于无人机航测正射影像不具备光谱信息,难以开展深层次数据挖掘。因此,未来利用无人机开展精细地形研究,宜采用无人机搭载多光谱、激光雷达等多传感器,以提高自动提取地形特征的精度。总而言之,无人机航测获取冰川区精细地形在未来冰川研究中具有非常大的潜力,尤其是提取冰面特殊形态,研究微尺度地形对冰川变化的影响,可有效弥补航天遥感的不足。
猜你喜欢 射影冰面冰川 冰面上的“魔力”科学大众·小诺贝尔(2022年2期)2022-03-22常曲率Berwald空间泉州师范学院学报(2021年6期)2022-01-07在天然冰面上滑行疯狂英语·新读写(2021年8期)2021-11-05射影平坦spray的射影Ricci曲率宁波大学学报(人文科学版)(2021年4期)2021-07-07为什么冰川会到处走?小天使·四年级语数英综合(2020年2期)2020-02-04冰面精灵女报(2019年12期)2019-09-10冰川会发出声音吗?创新作文(1-2年级)(2019年2期)2019-08-06不要在危险的冰面上玩耍好孩子画报(2019年12期)2019-01-13三参数射影平坦芬斯勒度量的构造华东师范大学学报(自然科学版)(2018年3期)2018-05-14长途跋涉到冰川金色少年(奇趣科普)(2017年12期)2017-12-26








