光电编码器信号误差补偿技术研究
时间:2023-05-30 12:55:11 来源:雅意学习网 本文已影响 人 
毕今朝,蒋佳奇,张洪博,常玉春
(吉林大学 电子科学与工程学院,长春 130012)
光电编码器在精密制造,航空航天,伺服系统等领域有着广泛的应用。在理想情况下,光电编码器的莫尔条纹光电信号应为两路正弦性良好,振幅相等,不存在直流分量,且相位相差90°的正余弦信号。但由于安装误差,内部电路设计,光栅刻画误差等因素的影响,使光电编码器的输出信号的等幅性、正交性、正弦性以及直流分量存在一定程度的误差。这些因素导致了细分误差的出现,对测角精度产生影响。因此需要一种补偿方法对信号进行修正,以达到提高测角精度的目的。
目前,许多科研机构和研究人员都针对莫尔条纹光电信号提出了多种对误差进行修正和补偿的方法。Jenkins等[1]利用夫琅禾费衍射对光电编码器的输出信号进行建模,提出了一种开环/闭环插值方法,并使用EKF(Extended Kalman Filter)算法校正两路信号的相位差。但闭环系统会增加系统的复杂度,而开环系统难以纠正自身处理的偏差。Heydemann[2]提出了一种利用最小二乘法的信号补偿技术,对信号的等幅性偏差,正交性偏差和直流分量误差进行了修正。但其计算量大,算法复杂度高。Erm等[3]利用卡尔曼滤波器估计模型的参数,并建立补偿模型,以补偿齿槽转矩,直流分量,高度误差以及摩擦力等因素带来的误差。但卡尔曼滤波的计算量较大。Zhu等[4]提出了一种直接细分非正交莫尔信号的方法。杨华晖等[5]利用EMD(Empirical Mode Decomposition)算法对光栅莫尔条纹进行去噪操作。但EMD算法存在模态混叠,以及端点效应等缺陷。鲍克勤等[6]提出了一种基于VMD(Variational Mode Decomposition)算法的光栅莫尔条纹去噪算法。此外,VMD还可以与其他算法结合实现信号滤波[7-9]。然而VMD算法的模态分量总数K需根据经验选取。沈思博[10]利用针对莫尔条纹光电信号偏差的自动测量算法和改进的闭环反馈细分算法修正光电编码器的等幅性偏差和正交性偏差,但这种方法循环次数较多,影响处理效率。此外,Gao等[11]提出了利用PSO(Particle Swarm Optimization)算法补偿光栅莫尔条纹信号的正弦性偏差,以及采用希尔伯特变换构建算法测量信号的正交性偏差和通过补偿查找表补偿信号的正交性偏差[12]。但粒子群算法容易陷入局部最优解,而希尔伯特变换需要进行FFT(Fast Fourier Transform)和IFFT(Inverse Fast Fourier Transform),其计算量较大。
笔者利用布谷鸟搜索算法结合最小二乘法设计了一种对莫尔条纹信号进行参数提取和偏差补偿的方法。此方法利用布谷鸟搜索算法对波形方程中的各参数进行辨识,利用辨识出的参数对信号的正弦性偏差,等幅性偏差,直流分量进行补偿。将辨识得到的相位参数用于构建查找表,以对信号的正交性偏差进行补偿。实验结果表明,该方法可以有效改善莫尔条纹光电信号的正弦性,正交性,等幅性以及直流分量的偏差,提高了光电编码器的细分精度。
理想情况下,光电编码器的输出信号应为两路正交的正余弦信号,信号的波形表达式为
u1(θ)=Asin(θ)
(1)
u2(θ)=Acos(θ)
(2)
细分角度可计算如下
(3)

(4)
然而实际上输出信号并非标准的正余弦信号,而是含有谐波分量,正交性偏差,直流分量,等幅性偏差的信号,上述偏差会使细分角度出现误差。信号的波形表达式如下

(5)
(6)
其中第1项为信号的直流分量,第2项为信号的基波,第3项为各次谐波。在输出信号中,二次谐波与三次谐波为主要误差来源,这些因素的存在使输出信号的正弦性受到影响。高于三次的谐波含量很少,故忽略不计。因此,信号的波形方程可表示为
2.1 莫尔条纹信号的参数识别
布谷鸟搜索算法是Yang等[13]在2009年提出的一种优化算法,这种算法是模拟布谷鸟的产卵行为进行寻优。布谷鸟在繁殖时,会将卵产在其他鸟类的巢穴里,让宿主孵化这些卵。一旦宿主发现这些外来的卵,便会将其丢弃。
布谷鸟寻找鸟巢的过程是通过莱维飞行实现的,莱维飞行是一种长步长和短步长交替的游走方式,其由较多的短步长和偶尔的长步长组合而成。
Mantegna[14]于1994年提出了一种求解服从莱维分布的随机步长的方法,笔者采用此方法求解符合莱维分布的随机数。生成规则如下

(9)
其中β=1.5,μ~N(0,σ2),v~N(0,1),并且

(10)
通过莱维飞行进行位置更新的规则如下

(11)
其中⊕为点乘,α的取值控制步长,通常取α=0.01。
设定宿主发现外来卵的概率为Pa,通常Pa=0.25。当通过莱维飞行进行位置更新后,生成一个(0,1)之间的随机数r,当r>Pa时,宿主发现外来卵,此时通过局部随机游走的方式更新鸟巢的位置。鸟巢的位置更新公式[15]如下

(12)

图1 布谷鸟搜索算法的流程图Fig.1 Flowchart of the cuckoo search algorithm
其中H(x)为Heaviside函数,s和ε为(0,1)之间的随机数。
布谷鸟搜索算法的流程如图1所示。
笔者通过布谷鸟搜索算法分别对式(7)和式(8)中建立的信号波形方程中正弦信号的参数A0~A3,φ1~φ3和余弦信号的参数B0~B3,ω1~ω3进行参数拟合。算法包含若干鸟巢,每个鸟巢中的卵都代表正弦或余弦信号中需要辨识的待定参数。
为实现多参数辨识,笔者采用布谷鸟搜索算法与最小二乘法理论结合的方式[11],以残差平方和构建适应度函数。莫尔条纹信号分别为Ssin和Scos,两路信号的波形方程设为式(7)和式(8),利用两组信号的残差平方和作为适应度函数,则正弦信号的适应度函数设置为

(13)
余弦信号的适应度函数设置为

(14)
在算法流程中,首先选取波形方程中待定参数A0~A3,φ1~φ3以及B0~B3,ω1~ω3的取值范围,并从此范围中随机选取参数的初始取值并计算相应的适应值。而后通过图1中的流程进行迭代更新,算法的每次迭代都会选取具有最优卵的巢穴位置,即当前最优参数,并根据适应度函数计算当前的适应值。适应值越小,表明由迭代得到的参数构成的波形方程与莫尔条纹信号拟合程度越理想,参数识别的效果越好。当一组解的适应值小于当前最小适应值时,则将这一组解视为当前最优解。当迭代达到最大次数时便停止迭代。
2.2 正弦性偏差补偿
信号中谐波分量的存在会影响信号的正弦性,为滤除输出信号中的谐波分量,需要得知二次谐波和三次谐波分量的参数,即A2,A3,B2,B3,φ2,φ3,ω2,ω3。笔者利用布谷鸟搜索算法对上述参数进行识别,在确定参数后对原始信号进行补偿,以达到滤除谐波的目的。
两路信号中,谐波分量的波形表达式分别为
hsin(θ)=A2sin(2θ+φ2)+A3sin(3θ+φ3)
(15)
hcos(θ)=B2cos(2θ+ω2)+B3cos(3θ+ω3)
(16)
将原始信号中的谐波分量进行去除,则经过补偿后两路信号的波形表达式为
gsin(θ)=usin(θ)-hsin(θ)
(17)
gcos(θ)=ucos(θ)-hcos(θ)
(18)
2.3 直流分量的补偿
在通过布谷鸟搜索算法获知两路信号的直流分量A0及B0后,可对信号中存在的直流分量进行修正。在滤除谐波后的两路信号分别为gsin(θ)和gcos(θ),通过布谷鸟搜索算法识别的两个信号的直流分量分别为A0和B0,校正后的正弦信号ksin(θ)和余弦信号kcos(θ)可以通过
ksin(θ)=gsin(θ)-A0
(19)
kcos(θ)=gcos(θ)-B0
(20)
得到。
2.4 等幅性偏差的补偿
对两路信号的等幅性偏差,需要对两路信号做处理,使其幅值相等。当正余弦信号分别为ksin(θ)和kcos(θ),通过布谷鸟搜索算法识别得到正弦和余弦信号的基波振幅分别为A1和B1时,正弦信号的振幅补偿表达式如下

(21)
2.5 正交性偏差的补偿
正交性是影响光电编码器细分精度的关键因素,笔者采用构建查找表的方法,以正弦信号作为标准,利用查找表实现对余弦信号的补偿,以修正信号的正交性。
经过参数辨识可得到莫尔条纹信号的基波相位φ和ω,由于已经对正弦性偏差、直流分量和等幅性偏差进行了补偿,所以此时的正余弦信号可看作仅含正交性偏差的信号,因此两路信号的波形方程分别为
nsin(θ)=Asin(θ+φ)
(22)

(23)
记两路信号的相位差ω-φ为ε,当其相互正交时,ε应为0。即不存在正交性偏差时,余弦信号的波形方程应为
ncos(θ)=Acos(θ+φ)
(24)
而当正余弦信号之间存在正交性偏差时,其波形方程为

(25)
对式(25)做泰勒展开[12],可得

(26)
取一阶泰勒展开,可得
Acos(θ+φ)=Acos(θ+φ+ε)+Asin(θ+φ)ε
(27)
式(27)为查找表的构造公式。
将两路正余弦信号经过上述方法进行处理,得到如下结果。
对两路信号利用布谷鸟搜索算法进行参数识别,将算法的迭代次数设置为500次,图2和图3分别为利用布谷鸟搜索算法对两路信号进行参数识别的适应值变化曲线。可见,随着迭代次数的增加,适应值也在下降,最终正弦信号的适应值于100次迭代后逐渐收敛,余弦信号的适应值于120次迭代后逐渐收敛。
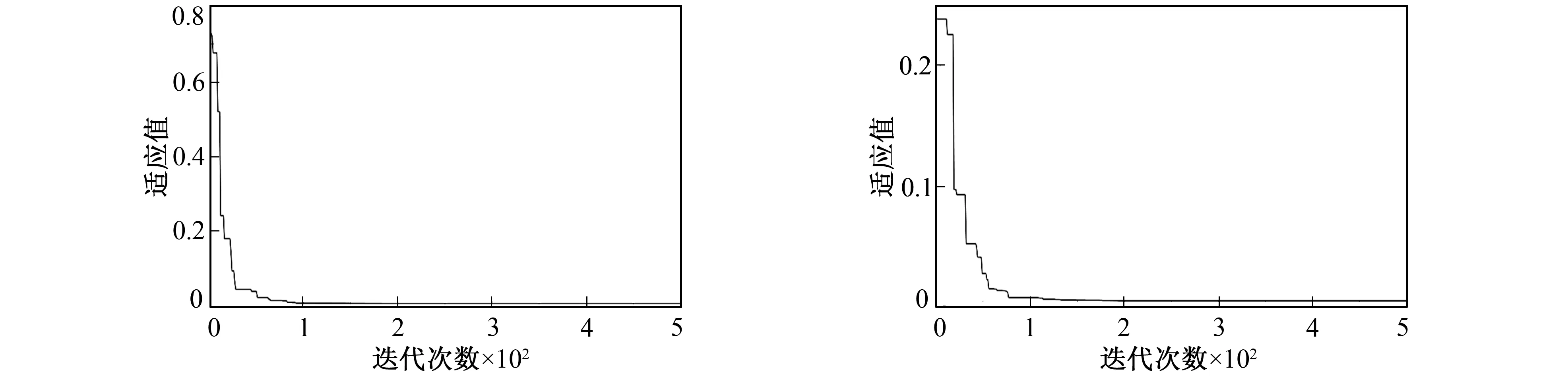
图2 正弦信号的适应值变化曲线 图3 余弦信号的适应值变化曲线 Fig.2 Fitness value of sine signal Fig.3 Fitness value of cosine signal
利萨如图形是由两路相互垂直的正弦振动合成的图形,两路信号的正交性越好,合成的图形越接近圆形。将补偿前后的两路信号分别合成利萨如图形,如图4所示,可以看出在补偿后两路信号合成的利萨如图形更接近圆形。经过补偿后,两路信号的正交性得到了改善。
细分误差为实际的细分角度与理想情况下的细分角度之间的差值,实际的细分角度为θ′,理想情况下的细分角度为θ,则细分误差的计算式为
e=θ′-θ
(28)
图5为原始信号的细分误差与经系统补偿后的细分误差。补偿前细分角度的误差最大值为56.25″,最小值为-4.90″,误差峰值为61.15″;
补偿后细分角度的误差最大值为10.55″,最小值为-6.38″,误差峰值为16.93″。经系统补偿后,细分误差有了明显降低,而且测角精度得到了提高。
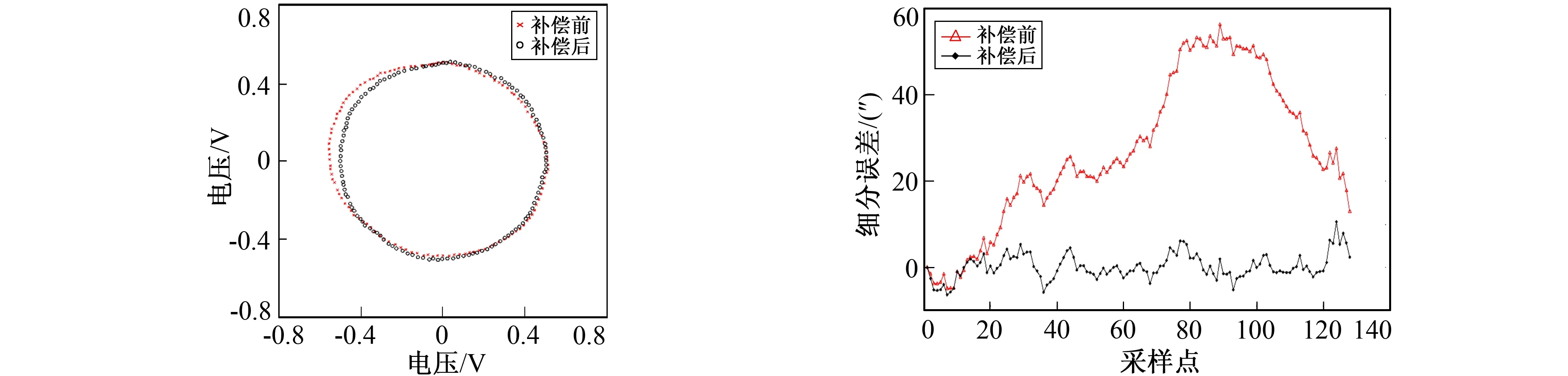
图4 两路信号合成的利萨如图形 图5 补偿前后的细分误差 Fig.4 Lissajous figure composed of two signals Fig.5 Subdivision deviation before and after compensation
笔者利用布谷鸟搜索算法结合最小二乘法设计了一种莫尔条纹信号多参数辨识的方法,利用辨识得到的参数对光电编码器莫尔条纹信号的正弦性偏差,直流分量和等幅性偏差进行补偿,并利用辨识得到的相位参数用于构建查找表,通过该方法实现正交性偏差的补偿。
实验结果表明,经过系统补偿后,细分角度误差峰值从61.15″降至16.93″,可见细分精度得到了提高。说明该方法可有效改善信号的正弦性,正交性,等幅性以及直流分量偏差,提升了光电编码器输出信号的质量,使光电编码器的测角精度有了进一步提高。
猜你喜欢 搜索算法余弦布谷鸟 一种基于分层前探回溯搜索算法的合环回路拓扑分析方法现代电力(2022年2期)2022-05-23布谷鸟读信红蜻蜓(2021年12期)2021-12-19改进的非结构化对等网络动态搜索算法军民两用技术与产品(2021年2期)2021-04-13改进的和声搜索算法求解凸二次规划及线性规划烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19基于莱维飞行的乌鸦搜索算法智能计算机与应用(2018年3期)2018-09-05椭圆余弦波的位移法分析计算机辅助工程(2018年2期)2018-06-03两个含余弦函数的三角母不等式及其推论中学数学杂志(高中版)(2016年6期)2017-03-01实施正、余弦函数代换破解一类代数问题福建中学数学(2016年7期)2016-12-03布谷鸟叫醒的清晨剑南文学(2016年14期)2016-08-22分数阶余弦变换的卷积定理北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27








