交叉足机器人的设计与研究
时间:2023-05-27 15:00:22 来源:雅意学习网 本文已影响 人 
潘涛,李发海,李泽杰,董浪
(湖北汽车工业学院 电气与信息工程学院,湖北十堰,442002)
近20年,科技高速发展,人工智能也从无到有,而机器人作为高新科技的一个产品,也在不断地进化升级,并在诸多行业中,影响着人类的生活生产。
人类在机器人的设计与制造上从未停止脚步,某些国家甚至把机器人发展列入“国家计划”中,而国内的机器人在工业、制造业等行业上也得到广泛的应用,同时随着人工智能的发展,让机器人的外观和功能也具有了多样性,不同功能的机器人在不同领域帮助人更好的或者代替人类去完成工作,例如在消防领域,有消防机器人代替消防员近距离进行救火任。可以说机器人的应用场所和应用功能也在一定程度上决定了机器人的设计理念,该文所写的交叉足机器人也是根据模仿一项体育田径比赛项目进行设计,从而使其实现相关的动作,机器人可以模仿人类一些动作,可以实现多种功能,具有较大的实际价值。
对于多种不同的方案进行研究讨论,我们最终选择最佳方案。方案实际上是以STM32F103单片机作为基础,根据交叉足机器人在做动作时可能遇到的各种不同的问题,人为对单片机编程并输入指令,并且调整好姿势,然后根据不同动作进行编程并且提高稳定性。除此之外,还要考虑多种不同的外在影响,确保机器人在做动作中可以保持稳定性、可靠性。
该机器人的核心点是STM32F103单片机,通过我们所学的知识,使用C语言对单片机进行编写和改进,使其可以控制多个舵机并且通过机械结构做出对应的动作,从而实现相关的功能;
机器人设计六个舵机模拟人类的关节作为关节驱动,即6个自由度,每条腿3个,可以灵活地做出动作;
一个舵机控制板作为模拟舵机的驱动从而控制机器人完成不同动作,以及一个电源为机器人供电。
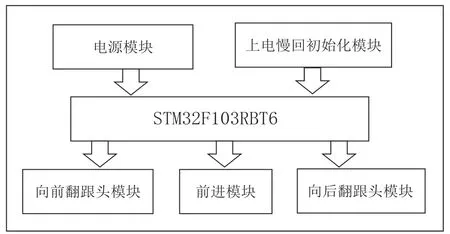
图1
■2.1 机械结构设计
交叉足机器人要求可以稳定准确地做出动作,能够稳定前进以及一些简单的抓拿动作,所以必须得设计好机械结构。我们根据人类的行走特点,每天腿选取三个舵机作为关节驱动,由于电机的旋转角度为±90°,所以将机器人每条腿的髋部和膝盖的2个舵机竖直放置,脚踝处的舵机水平放置的,其中髋关节处的舵机负责抬腿,实现前进,膝关节用于调节整个机器人的重心,并且根据实际情况进行调节使机器人保持平衡,踝关节在于配合膝关节,与地面直接接触,使机器人在行走的过程中,更加平稳。
在选取材料方面,我们选择了重量和硬度适中的金属作为机器人主要的框架,但是也用到了一些塑料板作为辅助材料,并且在材料使用方面必须是沿机器人中轴线对称,使其左右重量一样。为了确保机器人在行走时具有更好的平稳性,以及在做动作时手臂可以支撑起机器人全部重量,我们将机器人的手臂也设计为金属的。
头部设计。在使得机器人在翻跟头时可以保持平衡,并且不影响美观的基础下,我们设计了Y型头部,这样的头部设计还可以使得机器人在翻滚过程中有足够的转矩,不易发生方向偏移。
躯干设计。躯干包括髋部和膝部,在机器人整个运动中,髋关节和膝关节主要是通过舵机的角度变化来配合踝关节进行运动的,所以髋关节和膝关节要求材质坚硬,并且中间要留适当空间给机器人脚凸出来的交叉齿,除此之外考虑机器人在弯腰准备翻滚和翻滚结束准备站立时的平衡问题,最终决定头部以下框架为U型。

图2 机械结构简图

图3 关节驱动分配图
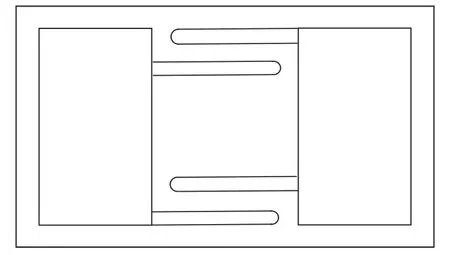
图4 足部设计简图
踝部设计。由于交叉足机器人的双脚需要有交叉齿,所以脚部在符合要求的情况下我们设计为扁平足,并且交叉齿长度要尽量长、质量适量重,材质适量硬,这样才可以保证机器人在单腿站立时可以保持平衡;
为使机器人整体在行走和进行其他动作时可以保持平衡,防止方向发生偏移,机器人外观设计时要把双腿需要打孔的地方,设计为从侧面和正面看,打孔的位置都在一条线上。

图5 STM32F103RBT6原理图
■2.2 控制系统设计
控制电路板主要由控制芯片和电源两部分。由于STM32芯片的内部集成了USB的外设,这也就使得USB电路设计可以有效减小。交叉足机器人的控制是STM32F103RBT6单片机为核心的控制系统。STM32F103RBT6是ST公司基于ARM最新Cortex-M3 架构内核的32位处理器产品,20K的 RAM、12位AD、4个16位定时器和3路USART通讯口等多种资源,时钟频率最高可达 72MHz,内置128KB的Flash,最多可以内嵌20KB的SRAM;
-2.0~3.6V供电和I/O,有睡眠、终止、待机三种不同是模式。电源需要同时为6个舵机和控制芯片供电,为了使电源可以持续稳定的供电,所以需要加入适量的稳压模块。
黄婉秋说自己没有什么特别的养生之道,只是心态好。现在日子好过了,都想有一个健康的身体。她觉得,身心都健康才是真正的健康,而要做到这一点,保持一个良好的心态非常重要:“以我自己的经验来说,我觉得我心态比较好,什么事情都可以想得很开。我还喜欢换位思考,总为别人想得多一些,我对人比较包容、宽容。这样一来,你就没有什么更多的烦恼了,这样你的身心一定会非常健康愉快。”
■2.3 动力源设计
当下可以作为动力源的电机有多种,包括直流电机、交流电机、步进电机以及伺服电机等。但是一些电机不符合我们的选取,例如交流电机不够精确,通电则动,断电则停不符合我们对机器人精度设计的要求;
步进电机同样因为精度不够而无法应用到交叉足机器人中。设计交叉足机器人的要求时在行走或做出动作时稳定、精确、且能长时间工作,综合考虑,我们最终决定全区伺服电机作为动力源。
舵机内部包括了一个小型直流马达;
一组变速齿轮组;
一个反馈可调电位器;
和一块电子控制板。其中,在工作的时候,马达提供了最开始的动力,然后变速齿轮组开始工作,从而使其产生更大的扭力再输出,当齿轮组的变速比愈来愈大时,马达的输出扭力同样也越来越大,即能承受的重量更大,但转动的速度将会越低。
在工作时,马达驱动减速齿轮组,其输出端带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压反馈给控制线路板,控制线路板将其与输入的控制脉冲信号比较,产生纠正脉冲,并驱动马达正向或反向地转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,从而达到使伺服马达精确定位的目的。

图6 舵机内部结构图
■2.4 舵机控制方式
舵机有多种控制方式,根据我们选取的电机特点,最终我们选择脉冲控制方式也称为差分控制。在舵机动作时,接收器接收两路高速脉冲,由于两路高速脉冲存在一定的相位差,所以电机运行的时候有两种旋转方向,即正转和反转,在电机工作时,两相高速脉冲相互交替,这种控制方式在实际应用中,具有很高的抗干扰能力,更加符合我们对机器人的要求。
■3.1 软件总体设计
交叉足机器人在软件的设计方面,用Proteus和Keil两款软件上进行程序编写,根据我们所需要的功能,编写不同的功能模块,然后将编写好的C语言程序嵌入单片机后,当我们用USB将机器人与上位机间接控制机器人时,在上位机软件上我们可以调节不同舵机的角度,从而可以将机器人的多个舵机同时运作,使其完成设计的动作。编写设计合理的程序植入单片机,设计出更多不同的动作模块,使机器人能够做出更多不同的动作,从而实现功能多样性。
■3.2 步态规划
现在主要的步态规划方法有:基于实验的规划方法、基于能量原理的规划方法、基于力学稳定性的规划方法。我们采用的是最后一种,先计算出符合要求的、理想的ZMP轨迹,然后推导每个关节的运动函数从而实现需要的理想行走。
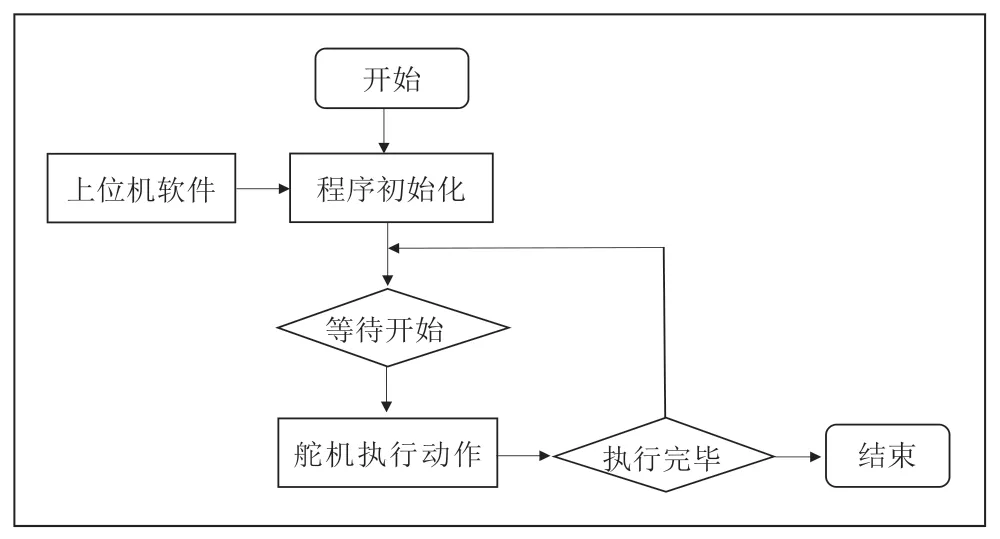
图7 程序流程图
从机器人的动作我们可以得出,机器人主要可以分为两个阶段,分别单脚支撑和双脚支撑,所以为了使得机器人在动作时保持平衡,需要使得其重心保持不变。我们将步态规划也分为两个阶段:
(1)从双脚站立到单脚抬起向前迈进,重心向前移动;
(2)摆动腿收回并迈向下一步,重心由支撑腿向摆动腿移动。
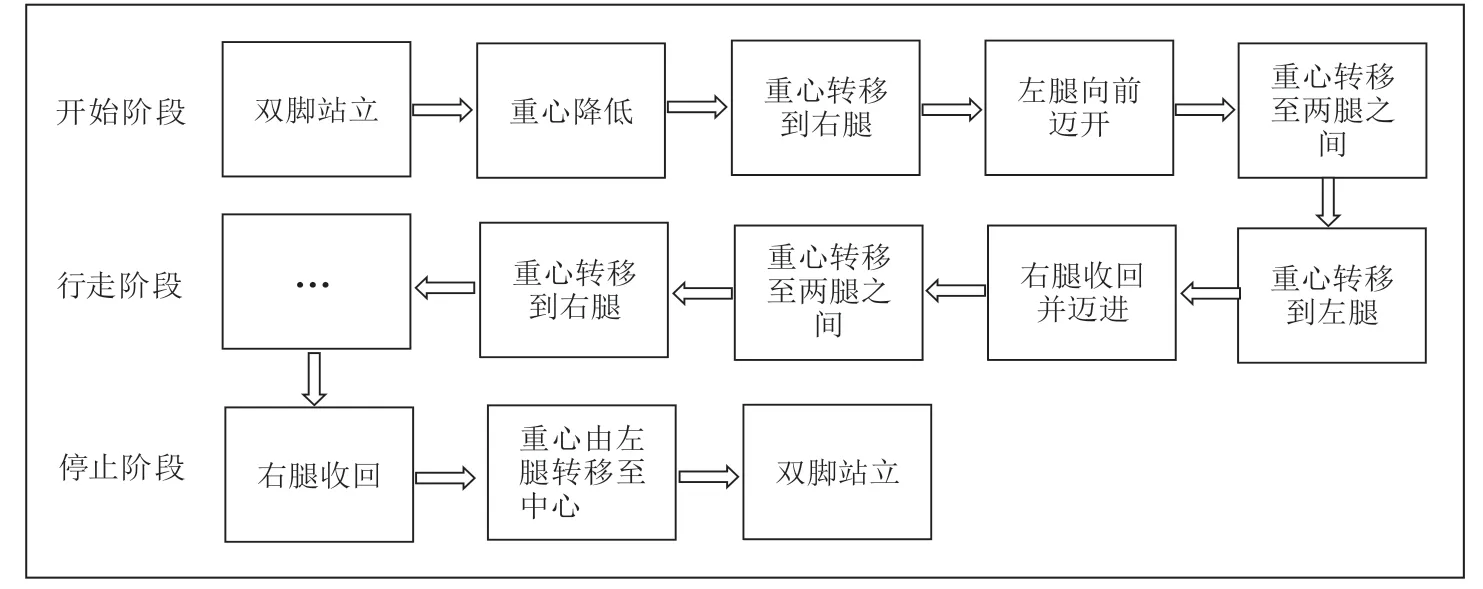
图8 步态规划流程图
■3.3 上位机软件
交叉足机器人在动作调试时,首先用USB线将机器人与电脑上连接,然后打开上位机软件,选择对应的端口,波特率选择9600,然后电机打开串口,待红灯变成绿灯,表明成功连接上位机。在整个窗口中,左边的使舵机控制面板,可以滑动滑块,控制舵机的运动角度,通过多个舵机的控制,我们可以把所有舵机的值保存下来,单调好一个动作后,我们点击“添加动作”,此时动作组数据面板会显示当前所有舵机的舵机值,运动的时间为“动作时间”中的数;
多个动作可以组成动作组,此时我们点击保存文件。
若想完成脱机运行,打开想要下载的动作组文件,然后选择要下载的动作组编号,点击下载,待弹跳出来的窗口显示“下载完成”,即下载成功。使机器人可以脱机运行,机器人内设有内存卡,可以将合适的音乐也导入进去,使机器人伴随着音乐做相应的动作。

图9 交叉足机器人上位机图
该机器人在外观、和功能上都模仿了人类的体育田径比赛,设计了6个自由度,满足其在动作时不同位置的要求;
外观上设计了两条腿,每条腿3个伺服电机作为关节驱动;
材料主要采用了重量和硬度适中的金属;
软件方面主要是用C语言进行程序编写,采用不同的编程思路,反复实验,选取最合适的程序方案,并在Keil和Proteus上进行在线仿真,确保机器人可以准确稳定地做出动作;
但最关键的点还是在于对单片机的应用程度,单片机的应用程度达不到将无法对6个舵机准确控制从而无法达到稳定、准确的要求。
在整个研究过程中,虽然遇到了许多未曾见过的问题,但在指导老师和团队成员的共同努力下,我们还是比较顺利地完成了此次的设计。并且对所学知识有了更有深度的理解,以及知道如何应用到实际中。更清楚地了解了交叉足机器人的适应性和发展性,使得交叉足机器人在实际应用中,得到很好的改进,也在不断地适应来自其他的优秀设计思路;
这也是对我们提出了更高的要求,需要我们去攀登更高的山峰,不断提高我们的创新能力和动手能力,及时总结反思,不断地提升自己,从而更快地适应新形势下的人工智能。同时在我们今后对交叉足机器人的研究中,也将思考以下的问题:
(1)机器人如何才能达到在不同的路况自主调节;
(2)机器人可以进行怎样的升级,使它的使用价值更大,应用范围更广;
(3)机器人怎么设计才可以使它更加环保,能够多次利用。
猜你喜欢 舵机交叉单片机 直升机某型舵机自动测试系统设计分析商品与质量(2021年43期)2022-01-18菌类蔬菜交叉种植一地双收今日农业(2021年12期)2021-11-28基于单片机的SPWM控制逆变器的设计与实现电子制作(2019年13期)2020-01-14基于单片机的层次渐变暖灯的研究电子制作(2019年15期)2019-08-27“六法”巧解分式方程初中生世界·八年级(2019年6期)2019-08-13基于单片机的多功能智能插排电子制作(2019年11期)2019-07-04基于单片机的便捷式LCF测量仪电子制作(2019年9期)2019-05-30基于dsPIC单片机的飞艇舵机控制实现电子制作(2018年1期)2018-04-04连数小学生导刊(低年级)(2016年9期)2016-10-13超音速舵机保护器航空模型(2016年5期)2016-07-25







