基于网络RTK技术分析新型无人机获取DEM的差异性
时间:2022-12-09 20:05:02 来源:雅意学习网 本文已影响 人 
刘 超, 武治群, 王 银, 余思汗, 杨 顺
(宁夏回族自治区地震局, 银川 750001)
高分辨率、高精度的地形地貌数据是活动构造定量研究的基础[1-2],有助于获取断层三维空间分布的细节特征,但是可获取的范围局限且野外工作量大,易受环境和人为等因素的制约。早期全站仪野外地形测量可以获取地形数据[3]。2002年Hudnut等[4]首次使用机载LiDAR(light detection and ranging,激光雷达)采集到了美国加州Hector Mine地震地表破裂带的三维地形数据,该技术分辨率和精度高、测量范围广以及能够穿透覆盖植被,被应用到了活动构造及地震地表破裂带的相关研究中[5-7],但其成本高、数据处理复杂使得广泛应用受限。近年来出现1种名为SfM(structure from motion)的新型数字摄影测量技术[8-11],通过从多视角的重叠摄影照片提取同名点并加以匹配,以自动解求相机的位置和姿态以及物方点的三维空间坐标[12],进一步获取三维地形地貌数据即包括数字高程模型(digital elevation model,DEM)和数字正射影像图(digital orthophoto map,DOM),其分辨率与精度可以和LiDAR数据相媲美,而且作业成本低、获取效率高、操作方式便捷[13]。随着小型无人机(如大疆精灵系列无人机)的迅速发展,以及三维建模算法和处理软件(如Agisoft Photoscan)功能的更新提升,SfM方法越来越多地应用于地震等相关领域研究[14-16]。
2018年大疆官方发布的Phantom 4RTK(文中简称精灵4RTK)无人机,是一款新型便携式、多旋翼高精度航测无人机,在定位模式下,GNSS(global navigation satellite system)信号良好时可精准定位,条件是只有当开启RTK(real time kinematic)模块且差分数据传输正常时,才可获得厘米级定位。但是,在实地测量时,特别是西部山区内没有4G信号的情况下,RTK模块无法开启并正常工作,只能在GNSS卫星定位下飞行,这两种情况下获取的DEM精度差异性如何,直接关系到后续活动构造及地震应急方面的应用前景。因此,精灵4RTK无人机在有、无网络RTK模块的情况下,分析获取的DEM差异性是一项十分重要的工作,但是由于精灵4RTK才出现不久,目前缺少这方面的对比分析,特别是在高程方面尚未有相关的研究。本文选取天景山山前的某一区域作为实验区,在有、无网络RTK模块的情况下分别进行航测,获取相应的DEM,通过选取明显地物点作为检查点,对比检查点坐标、检查点两两之间距离的差异性,探讨两种情况在活动构造及地震应急方面的应用前景。
实验区位于宁夏回族自治区中卫市沙坡头区永康镇西(图1中a),地处中国大陆南北地震带的北段,是青藏高原和阿拉善地块交汇的边界地带;
南部发育1条大型左旋走滑断裂即天景山活动断裂带,在1709年发生过中卫南7级地震,造成了60 km的地震地表破裂带[17],具有发生破坏性大地震的背景,区域构造活动强烈且地震活动形势严峻;
该地区的地貌正是这种特殊的构造环境所致,这为本次研究提供了良好的场所。
精灵4RTK无人机集成全新RTK模块,提供实时厘米级定位数据,显著提升图像元数据的绝对精度;
重量为1 391 g(含桨和电池),方便存放和携带;
搭载焦距8.8 mm、光圈f/5.6自动对焦的FC6310R相机,配备1 in、2 000万像素的影像传感器,保证了航拍照片的分辨率;
带屏遥控器内置全新GS RTK App,智能控制精灵4RTK采集数据。通过遥控器屏幕上的GS RTK App进行实验区航线的规划,航测范围为长100 m、宽100 m的正方形条带(图1中b),选择定时拍摄模式,飞行速度设置为7.0 m/s;
航高100 m,旁向重叠率70%、纵向重叠率70%。然后在GNSS卫星定位正常且有网络RTK模块和GNSS卫星定位正常且无网络RTK模块分别进行摄影测量,飞行完成时间为3 min 27 s 和3 min 28 s,获得照片均为34张,但有网络RTK模块获得的照片分类为FIX表明差分数据结算完成,无网络RTK模块获得的照片分类为SINGLE表明无差分数据结算仅有GNSS卫星定位。

图1 实验区位置及航线规划
利用集成SfM算法的软件Agisoft Photoscan处理航测照片,流程参考刘超等[18]影像数据处理的方法,通过解算相机的位置和姿态,生成密集点云,然后进行插值重建三维模型DEM和DOM。处理结果显示:有网络RTK情况下DOM的分辨率为2.75 cm/pix,DEM的分辨率为5.51 cm/pix,点云密度为329点/ m2;
无网络RTK情况下DOM的分辨率为2.79 cm/pix,DEM的分辨率为5.58 cm/pix,点云密度为321点/ m2。前者分辨率略高一点。
熊保颂[19]利用21个控制点和50个检查点,对精灵4和精灵4pro无人机获取的影像定位精度进行了研究,结果显示无控制点纠正情况下,平面坐标测量误差达32.58 m,但是,影像上量测的相对水平距离具有一定的测量精度,其误差会随着测量距离的增加而逐步降低,当水平测量距离小于100 m时,误差小于0.279 m;
有控制点纠正情况下,平面坐标测量误差为4.5 cm,为本次的研究奠定了理论基础。本文改进了研究方法,从新的方面、用不同的分析方法获得了新的结果和认识。
首先在获取的DEM和DOM上选取明显的地物特征点作为检查点。图2(a)和图2(b)分别为有、无网络RTK情况下DOM图上的检查点位置,其均匀分布在实验区内,而且保证为同一地物特征点,在有、无网络RTK情况下读取三维坐标,共得到17对检查点的X、Y、Z坐标(表1)。
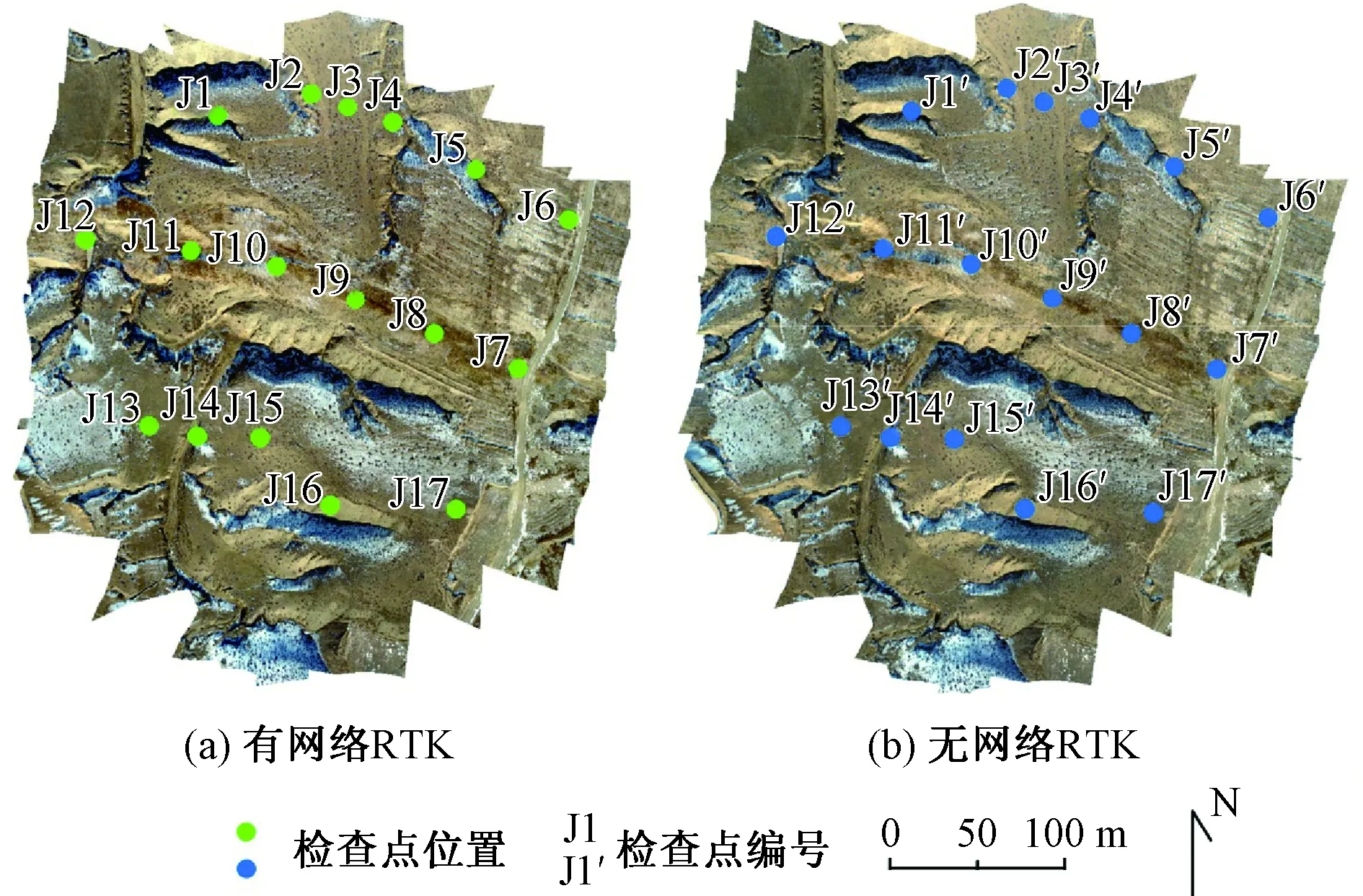
图2 实验区内的检查点分布
当GNSS定位正常时,多频、多系统高精度RTK GNSS理论上的定位精度为水平1 cm+1 ppm、垂直1.5 cm+1 ppm(1 ppm是指飞行器每移动1 km误差增加1 mm),但单频、高灵敏度GNSS的定位精度尚不清楚。本次研究将有网络RTK情况(多频)和无网络RTK情况(单频)下相应的检查点三维坐标进行差异对比,其中东西向差异计算公式:ΔX=|X-X′|,南北向差异计算公式为ΔY=|Y-Y′|,平面位置差异计算公式为ΔD2=(X-X′)2+(Y-Y′)2,高程差异计算公式为ΔZ=|Z-Z′|。17对检查点的计算结果见表2。

表1 检查点的三维坐标 单位:m

表2 相应检查点三维坐标差异的计算结果 单位:m
由表2可见,相应检查点三维坐标的平面位置(ΔD)和高程(ΔZ)差异较大,其中平面位置差异最大值为1.52 m、最小值为0.86 m、均值为1.17 m、中误差为1.18 m,高程差异最大值为1.92 m、最小值为0.72 m、均值为1.34 m、中误差为1.40 m,分析发现差异存在着必然性和偶然性,用实验数据的中误差代表两者之间的差异值(可认为是必然存在的系统误差),那么平面位置的差异为1.18 m、高程的差异为1.40 m,均比较大但小于1.50 m,无法满足活动构造定量化和精细化研究的精度要求。
在活动构造研究中测量水系扭动的水平位移量和地貌陡坎的垂直位错量时,点与点之间相对位置的差异决定了提取相关参数的大小[20],可用点与点之间的距离衡量相对位置。因此,本次研究进一步对比了有、无网络RTK情况下检查点两两之间距离的差异性,包括平面距离和高程之差,17对检查点计算共得到136组对比实验数据。
4.1 平面距离的差异性
分别以有、无网络RTK情况下计算的检查点两两之间的平面距离为横、纵坐标,用平面距离(有)和平面距离(无)表示,136组实验数据的散点图如图3(a)所示,很明显两者之间存在严格的线性关系,使用最小二乘法做线性拟合,拟合函数为y=0.998 99x-0.002 38,拟合优度R2=1.000 00。再进一步计算出两者的差值来表示平面距离的差异,为了研究方便进行了绝对值运算,并结合有网络RTK情况下计算的检查点两两之间的平面距离,绘制成图3(b)。分析可见:①整体来看,随着平面距离(有)的增加,差异的绝对值有着明显增加的趋势,考虑到实测数据处理过程中的随机偶然性,将其中7个偶然出现的异常点剔除掉[图3(b)中黑色虚线框内],那么有95%的数据就落在了紫色虚线的条带内,使得两者之间的对应关系更加清晰,这为后面的分析提供了极大的便利;
②在紫色虚线的条带内,每一个横坐标都能利用其范围内的实测数据找到一个对应纵坐标的上限值,代表差异的绝对值上限,选择典型平面距离(有)的值进行分析,当平面距离(有)小于50 m时,差异的绝对值上限为0.08 m,当平面距离(有)小于150 m时,差异的绝对值上限为0.23 m,当平面距离(有)小于250 m时,差异的绝对值上限为0.33 m;
③随着平面距离(有)从50、150、250 m的增加,差异的绝对值上限从0.08、0.23、0.33也随之增加,但并非线性增加的关系,假定两者服从一元二次方程y=ax2+bx+c,代入求得a=-0.000 002 5,b=0.002,c=-0.013 75,就得到了差异的绝对值上限函数[图3(b)紫色实线],根据函数将x=100代入计算得到y≈0.16,即当平面距离(有)小于100 m时,平面距离差异的绝对值上限为0.16 m。
4.2 高程之差的差异性
与平面距离的差异性分析相似,分别以有、无网络RTK情况下计算的检查点两两之间的高程之差为横、纵坐标,用高程之差(有)和高程之差(无)表示,136组实验数据的散点图如图3(c)所示,很明显两者之间也存在严格的线性关系,但是较平面距离的线性关系略弱一点,从拟合函数的自由度R2=0.988 48略低于之前的1.000 00就能体现出来,使用最小二乘法得出高程之差的拟合函数为y=1.000 04x-0.007 75;
同样用两者的差值表示高程之差的差异并将其进行绝对值的运算,结合有网络RTK情况下计算的检查点两两之间的高程之差绘制成图3(d),与平面距离不同,高程之差和其差异的绝对值没有明显的对应关系,136组实测数据计算的结果均小于1.20 m,那么差异的绝对值上限函数为y=1.20,即高程之差(有)小于30 m时,高程之差差异的绝对值上限均为1.20 m。

图3 实测数据的差异性分析
基于第3、4节的实测数据差异性分析可以看出,有网络RTK和无网络RTK两种情况下,检查点三维坐标的平面位置(ΔD)和高程(ΔZ)差异较大,平面位置的差异为1.18 m、高程的差异为1.40 m,均小于1.50 m。检查点两两之间距离的差异性在平面距离和高程之差两个方面有所不同,平面距离的差异随着相对距离的增加而增加,但在一定的距离范围内较小,即当平面距离小于100 m时,其差异的绝对值上限为0.16 m;
另一方面,高程之差的差异与相对高程之间没有明显的对应关系,其差异的绝对值上限均为1.20 m,可见无控制点情况下由于系统的差异比较大不适合测量相对高程。对照《活动断层探察:断错地貌测量》(DB/T 71—2018),水平距离的测量精度满足<1∶500且>1∶1 000测图比例尺的规范要求。现将两种情况在地震领域不同方面的应用探讨如下:
1)有网络RTK情况。摄影测量要求高,必须在有4G信号条件下,开启RTK模块且差分数据传输正常时,理论上才可获得厘米级定位,定位精度为水平1 cm+1 ppm,垂直1.5 cm+1 ppm,那么如果在野外实际测量时能够达到理论上的精度,可应用于活动构造研究中断层几何结构的精细解译和分析。
2)无网络RTK情况。摄影测量要求低,尤其是西部山区及无人区没有4G信号条件下,开阔的地方GNSS信号良好,卫星定位正常,平面距离差异较小,能够满足测图比例尺<1∶500且>1∶1 000的要求,适用于活动构造研究中小范围水平位移量的提取,但相对高程差异较大,建议不使用。如果从地震应急的方面去考虑,可以想象在大地震发生后的恶劣环境下,4G信号无法得到保障,为了在第一时间获取地震地表破裂带的影像数据并提取相关参数,这种无网络RTK情况下的无人机航测具有很好的应用前景。以2021年5月22日青海玛多发生7.4级地震为例[21],实测的最大左旋位移量约为2.9 m,通过经验公式估算的最大左旋位移量约为4 m,有1~2 m的地表挤压隆起和挤压脊,那么无人机在无网络RTK情况可以快速获取地震地表破裂带的正射影像,进一步提取水平位移量,其误差上限为0.16 m,能够满足应用要求。
1)精灵4RTK无人机在有网络RTK和无网络RTK两种情况下,平面位置和高程的差异较大。有网络RTK情况下,定位精度理论上可达厘米级,在活动构造研究中可以应用于断层几何结构的精细解译和分析;
无网络RTK情况下,定位精度差异上限小于1.50 m,无法满足活动构造定量化和精细化研究的精度要求。
2)精灵4RTK无人机在无网络RTK情况下,平面距离的差异与相对距离有关,随着相对距离的增加而增加,但在一定的距离范围内较小,当平面距离小于100 m时,其差异的绝对值上限为0.16 m,该精度适用于活动构造研究中小范围水平位移量的提取;
另一方面,高程之差的差异与相对高程之间没有明显的对应关系,其差异的绝对值上限均为1.20 m,该精度不能满足相对高程测量,建议不使用这种情况提取活动构造的垂直位错量。
3)精灵4RTK无人机在有网络RTK和无网络RTK两种情况下,对活动构造的研究都具有良好的应用前景。不仅如此,无网络RTK情况也可以应用到地震应急方面,展现出了精灵4RTK无人机在地震领域中广阔的应用前景。
无人机获取影像的分辨率和精度与天气环境、地面控制点、飞行高度、镜头角度、航向和旁向重叠率等多种影响因素有关,本文的精度分析是在晴朗天气、飞行高度100 m、镜头角度正射向下、航向和旁向重叠率均为70%等基础上进行的,这些影响因素的其他参数配置带来的定位精度差异,还需要更进一步探索和研究。
猜你喜欢 检查点高程精灵 红树林宜林地滩面高程及潮水退干时间时长的测量方法绿色科技(2022年16期)2022-09-15场景高程对任意构型双基SAR成像的影响军民两用技术与产品(2022年1期)2022-06-01Spark效用感知的检查点缓存并行清理策略①计算机系统应用(2022年4期)2022-05-10冬精灵小天使·一年级语数英综合(2021年2期)2021-05-088848.86m珠峰新高程当代陕西(2020年23期)2021-01-07欢舞的精灵们智慧少年·故事叮当(2020年6期)2020-06-21归来吧!精灵(连载三)学苑创造·C版(2019年4期)2019-05-09SQL Server数据库备份与恢复的研究与实践电脑知识与技术(2018年18期)2018-11-01基于二次曲面函数的高程拟合研究消费导刊(2017年8期)2018-01-18俏美精灵cookie world(2010年3期)2010-03-22







