利用引航软件提高船长靠离泊技能的方法
时间:2022-11-18 10:40:04 来源:雅意学习网 本文已影响 人 
黄迪
(宁波海运股份有限公司,浙江 宁波 315020)
保证靠离泊安全是船长的重点工作之一,即使船上有引航员协助,也要明确船长始终是第一责任人,这就要求船长必须要有较高的靠离泊技能。笔者在实践中发现引航软件“SEAiq Pilot”(以下简称引航软件或软件)不仅可以较好提高船长操船安全系数,更重要的还是可以通过对操船过程的完整记录,供船长有效运用刻意练习的原则稳步提高自身靠离泊技能。希望本文能抛砖引玉给同行一个启发。
1.1 软件工作架构
该软件是国内外引航员较为常用的引航软件,目前可以安装于iPhone、iPad 等多种移动终端中,通过连接于船载AIS 设备的AIS Pilot Plug 所发出的WIFI 信号接收本船AIS 数据源,该AIS 数据源中包括了船舶艏向传感器、速度传感器等各传感器所提供的船舶运动参数,最后软件将这些参数计算处理后输出强大的辅助靠离泊数据信息。软件工作架构如图1所示。
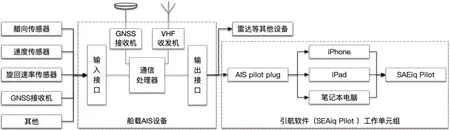
图1 引航软件工作架构示意图
1.2 辅助靠离泊操纵
软件在辅助船长靠离泊操纵时,能提供许多图形化的直观信息,比如艏/尾与泊位间的精确测距、艏/尾横移速度、船体与泊位的角度、预测船位、艏/尾运动趋势双矢量线、旋转角速度(ROT)等等,船长可以参考这些信息达到安全靠离泊的目的。
1.2.1 精确测量靠离泊三要素
船长在靠离泊操纵中始终要控制好“距离、速度、角度”这三个要素,软件可以辅助船长对上述靠离泊三要素的精确把握。
如图2所示为笔者重载涨水靠泊浙能六横煤电码头时的截图,图中清楚地显示着本船距泊位1 倍船宽时船艏/尾与泊位距离为船艏29.8 米,船尾33 米,艏/尾的靠拢速度为船艏0.06 米/秒;
船尾0.10 米/秒,靠拢角度1.2°基本平行于码头,船尾拖轮已处于拖位缆绳带力状态,非常直观。

图2 靠泊过程中精确测量“靠离泊三要素”
1.2.2 其他靠离泊操纵数据
船长在掉头靠离泊作业中对船舶的运动趋势要有较高的预见性,特别是重载状态下在有流港掉头靠泊中更是如此。如图3所示仍为上述重载涨水靠泊操纵中的掉头过程截图,图中4 个阴影部分代表本船未来2 分钟内的预测船位,每个阴影间隔30 秒;
两条弯曲矢量线分别代表船艏和船尾在未来6 分钟内的运动趋势,从此时的矢量线来看船体在4 分钟内可以掉头完毕;
此外顶栏的ROT 数据显示目前旋转角速度为向左22.6°/min,ROT 可供船长估算掉头至任意角度所需时间。这些数据都为船长安全靠离泊提供了有力支持。
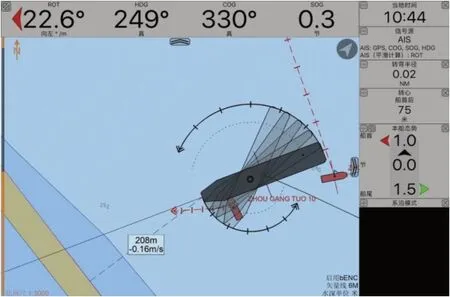
图3 掉头过程中精确显示船舶运动态势
1.3 记录功能
软件能够将靠离泊全过程记录下来,在回放中可以完整显示上述各种辅助靠离泊操纵数据,这也是我们对引航软件要重点利用的功能。
靠离泊操纵是一门实操性很强的技能,提高船长靠离泊技能需要用到刻意练习。刻意练习是佛罗里达州立大学心理学教授安德斯·艾利克森等在《刻意练习:如何从新手到大师》中提出的,它要求我们在平时工作中除了要有大量的练习或是实操,还要进行高质量的反馈以达到较好效果。这里的反馈最好来自高水平导师的即时指点,但在船长独立顶岗后这样的即时反馈也就随之结束了,因此船长必须要对每次的靠离泊操纵进行自我反馈,反馈可以通过对操纵过程的完整复盘进行,而这就需要有对操纵过程的完整记录作为前提条件。笔者在实践中利用引航软件的记录功能结合刻意练习原则,总结出了一套“提高船长靠离泊技能操作流程”(如图4所示)。此外船长还要能经常以某个稍有难度的目标为导向,在确保安全的前提下跳出舒适区进行靠离泊操纵。

图4 提高船长靠离泊技能操作流程图
2.1 记录与反馈
船长的每一次靠离泊经历都是宝贵财富,都值得记录与反馈。传统上许多船长都是在事后凭记忆去记录过程,但很多关键数据的缺失或不准确,难免会使反馈效果大打折扣。软件的记录功能很好地解决了这个问题,它能在船长操船过程中将本船的关键数据全部保存下来,在企业版软件中还可以同步记录船长发出的指令等音频信息,这大大提高了反馈的准确性。
记录信息可以通过两种形式回放出来,一是轨迹复原图形式;
二是视频回放形式,以上两种形式相辅相成,在进行反馈时可以先用轨迹复原图对本次靠离泊操纵进行一个操纵结果的总体评判,然后视频回放整个靠离泊过程,从操纵结果出发对自己在操纵过程中的各项指令做出精准反馈,分析不足之处,然后想办法来纠正。当然对于较好地操纵过程要总结优化,最后内化于心,达到有效提高靠离泊技能的目的。
2.1.1 轨迹复原图
不同于一般的ECDIS 只有线性轨迹记录,引航软件可以将本船运动中的船位以群组的方式按时间顺序排列展现出来,船长可以从本船运动全貌中对操纵结果进行大致的评判。
案例一:突遇大风浪掉头靠泊。图5为笔者某次重载涨水靠泊浙能乐清电厂码头的轨迹复原图,本次靠泊在掉头过程中突遇九级大风,风向东北为斜顺风,由于强风影响,从图中可以看出掉头过程几乎原地完成,未像往常一样在涨水流的作用下一边掉头一边漂向上游,接下来在掉头完毕向码头靠拢的过程中船位及时后退至合适水域,从而保证了与码头稳泊船的安全纵距,为最后的安全靠泊上好保险。从整个操纵的结果来看本次靠泊是比较成功的,没有因突遇强风而发生险情。接下来就可以用视频回放整个靠泊过程,以便将成功经验总结优化并内化于心。
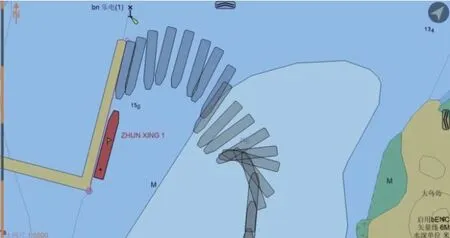
图5 案例一 突遇大风浪掉头靠泊轨迹复原图
2.1.2 视频回放
软件在视频回放时可以动态展示和靠离泊当时一致的所有数据,图6为案例一的视频回放截图,可以看出当时由于强风的影响,掉完头后还一直有进速,为了与码头稳泊船及时拉开纵向距离,笔者在用拖轮控制好船舶横移速度和角度的同时,先用较长时间的倒车将船退到安全位置,再合理使用车舵及拖轮以抵消强斜顺风带来的不利影响,最终将船舶以极低的速度贴上泊位。整个靠泊过程是顺利的,但也有需要总结优化的地方。在回放中发现船舶向码头靠拢的过程中,船尾在拖轮拖拉状态下偶有发生大幅向右偏移的情况,后来知道这是由于大风浪使船尾拖轮短时无法保持住船位所致,虽然当时拖轮又很快恢复状态并及时拖住,但由此笔者就想到了如果下次再遇到这种情况,就要有随时准备用短时进车配合右满舵去克服不利情况的思维模式,最后将这个思维模式内化于心。

图6 案例一 突遇大风浪掉头靠泊视频回放截图
2.2 与他船的对比反馈
好的反馈还需要与他船的靠离泊范例进行对比,通过与好的范例对比可以更好地判断自己的操纵是否合理,这就需要对他船的靠离泊过程也进行记录,软件的虚拟登轮功能可以为此提供条件。船长虚拟登上某条正在靠离泊操作的船舶后,该船的动态数据就能和本船一样一目了然,并也可以完整记录,供船长用来和自己的操纵做对比。笔者建议在港期间可以重点虚拟登上一些由引航员操纵的船舶,一般由本港引航员操纵的靠离泊可以成为较好的范例进行对比反馈之用。这个对比反馈可以是同一个泊位,也可以是不同的泊位
2.2.1 与同一泊位的较好范例对比反馈
案例二:狭窄港池开首掉头离泊。笔者某次在京唐港期间虚拟登上一条正在该港11 泊离泊的外轮,当时该轮由引航员采用开首向左掉头的方式离泊,整个离泊过程较为安全顺畅,笔者用软件对此进行了完整记录(见图7中的绿色轨迹)。凑巧没过多久笔者也靠上了京唐港11 泊,在离泊时同样采用了开首向左掉头法(见图7中的红色轨迹)。将两条轨迹复原图叠加在一起后,可以看出两条轨迹基本一致,通过对比说明笔者的操纵结果基本合理。然后再用视频回放来复盘整个离泊过程,图8为本船的视频回放截图,从中可以看出当时本船转心被较好地控制在船尾位置,船舶运动态势呈扇形状,这样可以保证在船尾距码头较近位置处完成掉头动作,通过本次总结再次验证了对转心位置的精确把握是船舶在狭窄水域安全掉头的关键因素。

图7 案例二 狭窄港池开首掉头离泊(与他船轨迹对比)

图8 案例二 狭窄港池开首掉头离泊视频回放截图
2.2.2 与不同泊位的较好范例对比反馈
刻意练习还要求船长要适时走出靠离泊操纵的舒适区。为了能让自己的靠离泊技能持续提高,船长可以把较为简单的泊位甲当成一个练习场地,将其想象成某个难度稍高的泊位乙,有意识地给自己稍稍增加点难度,然后通过和靠离泊位乙的较好范例相对比,从中分析问题并总结优化,为以后靠离类似泊位做好准备。
案例三:不规则港池顺势开尾掉头离泊。如图9所示为秦皇岛煤五期港池,该港池上部呈梯形,708 泊位于梯形北部,可用水域较窄,709 泊位位于梯形南部,可用水域较宽。显然从708 泊掉头离泊的难度较709 来说要稍高一点。笔者在某次从709 泊离泊时有意识地将其想象成708 泊,并用先退至合适位置后再向右掉头的离泊方式实施操纵,而且整个后退和掉头过程未使用倒车(见图9中红色轨迹),在事后回放复盘中自我反馈评价还可以。然后笔者找机会虚拟登上几条从708 泊离泊的船,选出一条操纵较好的船舶进行对比(见图9中的绿色轨迹),通过对比其中的运动数据发现两者基本一致,表明笔者的操纵方式可以从708 泊安全离泊,反馈效果较好。所要总结优化的是在后退时可以适当短时用倒车将船位退至更靠南些的位置,这样掉头水域就更宽敞,确保离泊操纵万无一失。
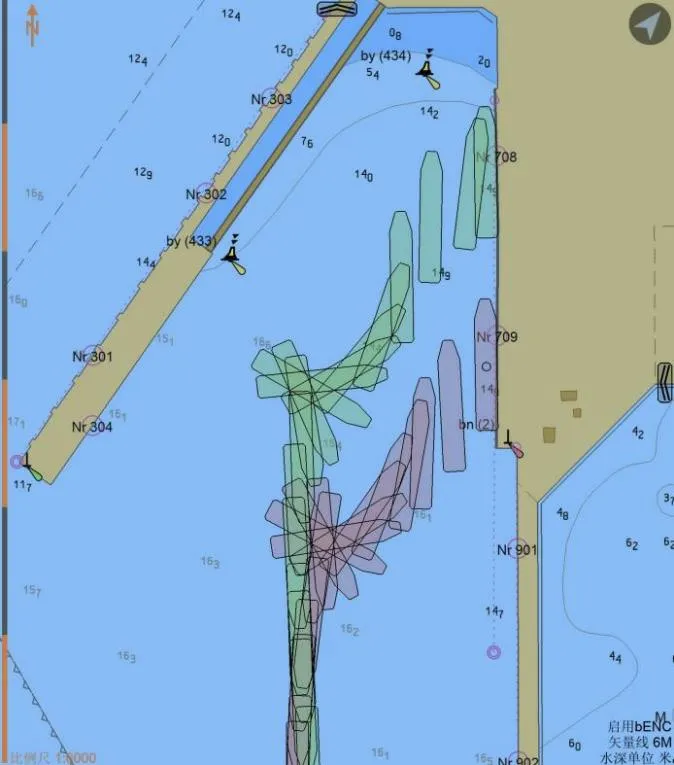
图9 案例三 不规则港池顺势开尾掉头离泊(与他船轨迹对比)
以上案例均是利用软件对靠离泊操纵数据的完整记录来帮助船长在事后有效反馈自己的操纵是否合理,以期在不断地改进、优化中提高自己的靠离泊技能。值得注意的是该软件虽然能给船长提供高质量的辅助靠离泊数据信息,但也有其局限性。软件所展示出来的船舶各项运动参数的准确性取决于船载AIS 数据源的准确性,也就是取决于船舶各传感器数据的准确性,由于在近距离靠泊操纵时对船体运动态势需要有足够强的敏感性,为了确保不因相关传感器微小误差和延时而影响安全,笔者不建议在距码头一倍船宽以内的近距离靠泊操纵时使用该软件,也提醒在使用时不能对其过分依赖。
引航软件在船长靠离泊操纵时可以提供较为精确的数据信息,并可以将这些数据全部记录下来。船长可以利用引航软件的这些优势,参照本文图4所示“提高船长靠离泊技能操作流程图”的步骤,通过分析不足之处并及时纠正,总结优化好的方法并内化于心,最终达到提高靠离泊技能的目的。
猜你喜欢 泊位轨迹船长 浅谈求轨迹方程中的增解与漏解福建中学数学(2021年1期)2021-02-28无从知晓小资CHIC!ELEGANCE(2021年44期)2021-01-11我国城市道路路内停车泊位应如何设置汽车与安全(2019年5期)2019-07-30“船长”失格新民周刊(2018年43期)2018-11-21惠州港荃湾港区通用码头某泊位超限靠泊码头水域及航行条件适应度论证研究珠江水运(2017年16期)2017-09-21捕捉物体运动轨迹课堂内外(小学版)(2017年3期)2017-04-15印度尼西亚安汶港介绍远望5号测量船现代经济信息(2016年6期)2016-05-31丢失小学阅读指南·高年级版(2014年6期)2014-08-19RIZE港介绍科技致富向导(2013年21期)2013-12-10蚂蚁小船长小学阅读指南·低年级版(2009年7期)2009-09-27







