LCL型逆变器的积分IDA-PBC控制策略
时间:2023-06-26 19:15:05 来源:雅意学习网 本文已影响 人 
柴秀慧, 张艳蕾, 张 迪, 张纯江, 赵晓君
(燕山大学电气工程学院, 河北 秦皇岛 066004)
随着新能源发电渗透率日益增加,以及碳达峰碳中和战略的提出,可再生能源得到大力发展[1]。逆变器作为连接系统与电网的关键设备,从运行角度看,其稳态与动态性能指标尤为重要[2]。由于逆变器模型结构强耦合、高阶、非线性的特点,采用传统线性控制很难保证逆变器具有良好的动态性能[3],非线性可以有意地引入到控制系统的控制器部分,从而可以接纳模型的不确定性。随着控制系统理论的不断发展,反馈线性化理论、滑模变结构理论、自适应控制、无源控制理论等非线性控制方法逐步得到广泛应用[4,5]。
针对模块化多电平变换器非线性、强耦合的特点,文献[6]提出一种参数自适应非线性控制方法,建立数学模型并根据李雅普诺夫方程设计满足系统稳定性要求的控制变量,但这种处理不确定系统或时变系统的方法实时性差[7]。文献[8]采用滑模变结构控制策略,利用反馈线性化理论转化为线性模型,实现解耦控制,并设计滑模变结构控制器,使得系统具有良好的动态调节能力和稳态特性,以及对参数偏差具有较强的鲁棒性。但是将非线性系统转换成线性系统,对参数的要求高、控制复杂[9],而且滑模变结构控制策略中系统的结构是不固定的,存在抖振问题[10,11]。以上提到的控制方法并没有全面地解决电能变换器的控制问题。
对此,将无源控制理论应用到电力电子技术装置控制中。无源控制的优点是在保证逆变器系统稳定的前提下,提高逆变器控制系统的动态性能[12]。无源控制器设计方法主要有欧拉-拉格朗日(Euler-Lagrange,EL)和端口受控耗散哈密顿(Port-Controlled Hamiltonian systems with Dissipation,PCHD)两种模型。采用EL模型的无源控制可以减小系统的动态超调,抗干扰性强,但动态响应速度慢、达到稳态时间长[13-15]。实际应用中,采用PCHD模型设计控制器较为繁琐,对此,常采用互联和阻尼分配无源控制 (Interconnection and Damping Assignment Passivity Based Control,IDA-PBC)进行设计。
文献[16,17]论述了单相光伏逆变器在强电网并网、弱电网并网和离网三种模式下的控制设计,基于IDA-PBC模型设计无源控制器,仿真结果证明无源控制器能很好地适应参数变化,具有较强的鲁棒性,对各次谐波均有较好的抑制作用。文献[18-20]建立了三相LCL滤波并网逆变系统的PCHD模型,基于间接控制思路设计IDA-PBC无源控制器,仿真结果证明该控制方法能够以较快的动态响应速度跟踪给定参考电流,并网功率波动小,有较强的鲁棒性。文献[21-23]基于IDA-PBC控制策略进行控制器设计,直流侧采用的是模糊控制的PI控制器,在线调整参数大小,与传统PI控制性能进行比较,证明了采用无源控制谐波含量更少,鲁棒性更强。
以上无源控制在逆变器的应用中均能有效提高系统的动态性能和抗扰动能力,实现全局稳定。但针对IDA-PBC中注入阻尼的参数并未给出具体的设计方案,而且相比于传统控制存在较大的稳态误差,稳态性能欠佳。
本文首先基于IDA-PBC对LCL型逆变器进行性能研究,为解决控制模型多变量相互耦合和控制结构复杂的问题,建立IDA-PBC的去耦等效控制模型,并提出一种注入阻尼设计方法。然后,为了减小稳态误差,提出一种积分IDA-PBC控制策略。最后,通过实验验证控制策略的可行性。
2.1 基于IDA-PBC的控制原理
图1为LCL型逆变器拓扑,其中Vdc为储能电池端电压;
C1、C2为直流母线电容;
S1~S6为功率管;
Lf1、Rl1分别为前级桥臂侧滤波电感和线路等效电阻;
Cf为滤波电容;
Lf2、Rl2分别为后级滤波电感和线路等效电阻;
iLa、iLb、iLc为前级滤波电感电流;
iCa、iCb、iCc为电容电流;
iga、igb、igc为并网电流;
uga、ugb、ugc为并网电压;
N为直流母线中点。

图1 LCL型逆变器拓扑Fig.1 LCL inverter topology
选取iLa、iLb、iLc、iga、igb、igc、uga、ugb、ugc作为状态变量,经坐标变换得到dq坐标下数学模型:
(1)
式中,iLd、iLq为dq轴前级滤波电感电流;
idg、iqg为dq轴并网电流;
uCd、uCq为dq轴滤波电容电流;
udg、uqg为dq轴电网电压;
uDN、uQN为dq轴逆变器输出端电压;
ω为电网基波频率所对应的角频率。
IDA-PBC设计思路是确定一个控制律u,使系统的闭环PCHD模型为:
(2)
式中,x为状态变量;
Jd(x)为期望的互联矩阵,Jd(x)=J(x)+Ja(x);Rd(x)为期望的耗散矩阵,Rd(x)=R(x)+Ra(x);
Hd(x)为期望的总能量存储函数,Hd(x)=H(x)+Ha(x);
J(x)和R(x)分别为互联矩阵和耗散矩阵;
H(x)为哈密顿函数;
Ja(x)和Ra(x)为待定矩阵;
Ha(x)为待定函数。
根据式(1)和式(2),选取状态变量为:
(3)
通过能量分配和注入阻尼的方式,设计矩阵Ja(x)、Ra(x)和矢量函数K(x)=∂H(x)/∂x,满足:
(4)
式中,g(x)为系统结构矩阵,代表系统各个端口之间的特性。
为简化控制器的设计,同时由于dq轴的对称性,即令:
(5)
式中,r1、r3和r5为注入的阻尼。
设K(x)为常数,且满足K(x*)=0,其中,x*为状态变量参考信号,则K(x)各分量取值为:
(6)

将各参数值代入式(4),得状态变量期望值为:
(7)
(8)
系统的无源控制律为:
(9)
2.2 基于IDA-PBC的控制模型等效
根据2.1节中采用的IDA-PBC控制方法,通过注入阻尼从理论上得到状态变量参考值,而注入阻尼的大小会影响系统动静态性能。因此本文针对IDA-PBC控制模型进行等效处理,建立IDA-PBC的去耦等效控制模型,然后基于该模型提出一种注入阻尼设计方法,对逆变器电流传递函数进行等效分析,根据频率特性稳定判据来判断注入阻尼的大小和范围。
以d轴为例,忽略q轴项影响,则d轴的控制模型表达式为:
(10)
根据式(10)绘制IDA-PBC控制框图,如图2所示,变量之间相互耦合,导致控制结构复杂,增加了注入阻尼参数设计难度。为了简化设计过程,对图2进行等效简化,建立了IDA-PBC的去耦等效控制模型,等效简化处理具体过程如图3~图7所示。

图2 基于IDA-PBC的控制框图Fig.2 Control block diagram based on IDA-PBC
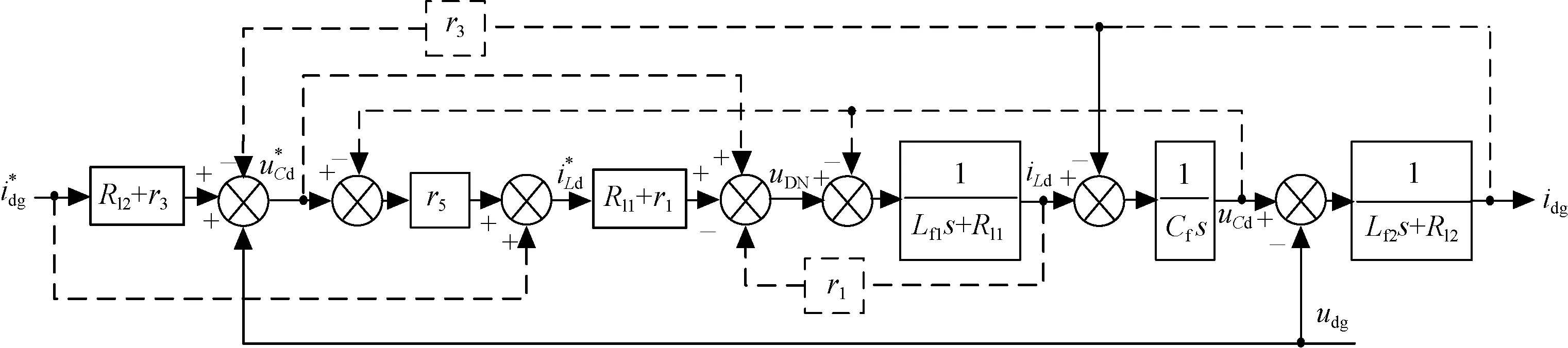
图3 等效控制框图1Fig.3 Equivalent control block diagram 1
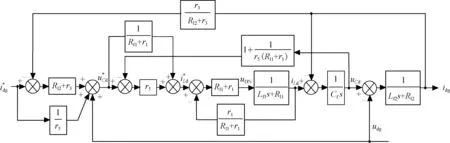
图4 等效控制框图2Fig.4 Equivalent control block diagram 2

图5 等效控制框图3Fig.5 Equivalent control block diagram 3

图6 等效控制框图4Fig.6 Equivalent control block diagram 4

图7 等效控制框图5Fig.7 Equivalent control block diagram 5
图7中,ωn1和ωn2为无阻尼振荡角频率;
ξ1和ξ2为阻尼比;
Trlc为微分时间常数,而ωrlc为对应角频率。各项表达式为:
(11)
3.1 注入阻尼r5和r1的关系
由于Rl1和Rl2很小,可忽略不计,若不考虑电网电压udg的干扰,则图7可变换为如图8所示,被控对象Gbk(s)的传递函数表达式为:
(12)
开环传递函数表达式为:
(13)
其中,开环增益KC为:
(14)

图8 等效控制框图6Fig.8 Equivalent control block diagram 6
为了保证系统的稳定性,要求注入阻尼大于零,即r5>0、r1>0,则根据式(11)代入逆变器主电路系统参数,计算得出谐振频率ωn1>ωn2,阻尼比ξ1>ξ2,因此设计时以ξ2为主,由式(11)推导出注入阻尼r5的表达式为:
(15)
3.2 注入阻尼r1的参数设计方法
因为注入阻尼大于零,即存在约束条件:
(16)
根据式(16)推导可得注入阻尼r1的最小值为:
(17)
将式(15)代入r1r5+1可得:
(18)
则将式(18)代入式(11)整理得到:
(19)
通常为了使系统稳定,且有足够的稳定裕度,一般希望开环对数幅频特性的中频段斜率为-20 dB/dec。为了保证以-20 dB穿越零轴,期望系统满足ωn1>ωrlc,因此,假设ωn1=k1ωrlc(本文选取k1=2),代入式(18)整理得到注入阻尼r1为:
(20)
3.3 注入阻尼r3的参数设计方法
开环剪切频率ωc的约束条件为:
ωrlc<ωc<ωn1
(21)
因此,根据上述推导得到开环传递函数对数幅频特性如图9所示,可以得到:
(22)

图9 基于IDA-PBC控制开环传递函数幅频特性Fig.9 Amplitude-frequency characteristics of open-loop transfer function based on IDA-PBC
由此求得开环增益表达式为:
(23)
则开环剪切频率ωc为:
(24)
将式(24)代入式(21),整理得注入阻尼r3的范围为:
(25)
由此可知,注入阻尼r3最小值为:
(26)
r3最大值为:
(27)
3.4 开环和闭环特性分析
注入阻尼的设计以阻尼比ξ2为主,为满足系统性能稳定,取ξ2=0.5,代入主电路系统参数式求得r1=120.604 5,r5=0.157 5,r3_min=-0.317 4,r3_max=5.712 8,此时开环传递函数伯德图如图10所示。由图10可知,随着注入阻尼r3增大,开环增益增大,剪切频率增大,动态响应速度增大,但同时相角稳定裕度减小,折中选取r3=4。

图10 开环传递函数伯德图Fig.10 Bode diagram of open loop transfer function
根据图8可得系统闭环传递函数表达式为:
(28)
根据式(28)进行闭环响应特性分析,d轴并网电流响应波形如图11所示。t=0.01 s时给定参考输入发生阶跃,输出的并网电流idg动态响应超调小、抗扰性能强,但实际输出电流没有完全跟踪上给定参考输入电流,系统存在稳态误差。由此可知,采用IDA-PBC能够有效减小动态超调,提高系统的抗干扰能力,但对稳态性能有不利影响。

图11 d轴并网电流响应波形Fig.11 Response waveform of grid connected current of d-axis
4.1 LCL型逆变器积分IDA-PBC控制策略
由IDA-PBC控制原理分析可知,系统的动态性能得到极大改善,但存在稳态误差。对于直流系统,采用积分控制器可以减小稳态误差,但如果只采用积分控制器时,动态超调变大,当切入满载时,电流会超过额定值,甚至会损坏器件。因此,本文中将IDA-PBC与积分控制相结合,提出一种积分IDA-PBC控制策略,控制框图如图12所示,其中udr、uqr为dq轴调制波。

图12 积分IDA-PBC控制框图Fig.12 Integral IDA-PBC control block diagram
并网功率发生突变,当逆变器给定参考电流与输出电流的误差大于阈值eth,并网电流控制采用注入阻尼方法以减小动态超调,通过动态调节系统逐渐趋于稳定;
当逆变器给定参考电流与输出电流的误差小于阈值eth,认为系统进行稳态,并网电流控制切换到积分控制,保证系统以较小的稳态误差稳定运行。
4.2 基于积分控制器的并网电流环控制原理
为了减小稳态误差,在并网电流环控制中引入积分控制器,按照2.2节控制模型的等效简化过程,绘制引入积分器的等效控制框图如图13所示。

图13 基于积分器的等效控制框图Fig.13 Equivalent control block diagram based on integrator
由图13可求得系统的开环传递函数为:
(29)
式中,积分时间常数Ti=1/(Kir5),Ki为积分控制器系数。
由式(29)可知,开环增益为:
(30)
为保证以-20 dB穿越零轴,ωc应满足:
ωrlc<ωc<ωn1
(31)
此时,引入积分控制器后的开环传递函数幅频特性如图14所示。相较于注入阻尼,引入积分器后,开环传递函数对数幅频特性曲线的低频段频率为-20 dB/dec,开环增益变大,则意味着稳态误差变小,跟踪精度变高。

图14 基于积分IDA-PBC控制开环幅频特性Fig.14 Amplitude-frequency characteristics of open-loop transfer function based on integral IDA-PBC
根据图14,系统对数幅频特性表达式为:
(32)
整理式(32)求得系统开环增益KC表达式为:
(33)
由式(33)推导得出系统的开环剪切频率为:
(34)
假设时间常数Ti的倒数满足如下所示:
(35)
式中,k2为常系数,k2>0,本文取k2=0.8。
则积分系数Ki表达式为:
(36)
根据图13,系统闭环传递函数表达式为:
(37)
4.3 开环和闭环特性分析
根据式(35)计算得到积分系数Ki=76 555,分别绘制IDA-PBC、积分控制开环传递函数伯德图如图15所示。由图15可知,采用积分控制系统的低频开环增益变大,将会减小系统的稳态误差,提高跟踪精度;
采用IDA-PBC系统的高频段衰减速度快,提高系统的抗扰动性能。

图15 开环传递函数伯德图Fig.15 Bode diagram of open-loop transfer function


图16 d轴并网电流波形Fig.16 Waveform of grid connected current of d-axis
因此,提出采用积分IDA-PBC控制策略。功率切换的动态过程并网电流采用注入阻尼方法,具有IDA-PBC的良好动态抗扰性能;
稳态时并网电流采用积分控制器具有良好的稳态性能,大大减小了稳态误差。该控制策略兼顾了动静态性能,提高了系统的全局稳定性。
为了验证本文提出的参数设计方法和控制策略的可行性,利用如图17所示的实验平台进行实验验证,表1为LCL型逆变器设计指标。

图17 实验平台Fig.17 Experimental platform

表1 LCL型逆变器设计指标Tab.1 Design index of LCL inverter
5.1 基于IDA-PBC的逆变器实验验证
图18为功率切换时采用IDA-PBC的逆变器三相并网电流波形,图18(a)为功率减小时三相并网电流变化波形,图18(b)为功率增加时三相并网电流变化波形。由图18可知,功率切换过程中并网电流波形振荡较小,约3 ms后进入下一个稳态,由此可知,采用IDA-PBC系统具有较快的动态响应速度。

图18 基于IDA-PBC控制功率切换时并网电流波形Fig.18 Control grid connected current waveform during power switching based on IDA-PBC


图19 基于IDA-PBC控制dq轴并网电流波形Fig.19 dq-axis grid-connected current waveform based on IDA-PBC
5.2 积分IDA-PBC控制的逆变器实验验证
图20为功率切换时的逆变器三相并网电流波形,图20(a)为功率减小时三相并网电流变化波形,图20(b)为功率增加时三相并网电流变化波形,由图20可知,功率切换过程中并网电流波形几乎无振荡,功率突变时并网电流波形平滑切换到下一个稳态,相较于IDA-PBC动态响应快速性有所提高,有较强的抗扰动能力。

图20 基于积分IDA-PBC控制功率切换时并网电流波形Fig.20 Control of grid connected current waveform during power switching based on integral IDA-PBC

图21 基于积分IDA-PBC控制dq轴并网电流波形Fig.21 dq-axis grid-connected current waveform based on integral IDA-PBC
因此,采用IDA-PBC兼顾了系统的稳态性能与动态性能,动态切换过程系统的动态响应超调量显著下降,有效提高了系统的快速性和抗扰动能力,稳态时系统具有高精度的跟踪性能。
针对LCL型逆变器的无源控制,本文在IDA-PBC的基础上,提出一种积分IDA-PBC控制策略,通过控制模型的建立和控制参数的设计,得出如下结论:
(1) 动态调节时采用IDA-PBC能够加快系统的动态响应速度,减小动态超调和动态振荡,但系统存在稳态误差。
(2) 稳态运行时在IDA-PBC基础上引入积分控制器,有效降低LCL逆变器输出电流的稳态误差,提高输出电流的跟踪精度。
猜你喜欢开环无源传递函数十氢萘选择性开环反应的研究进展燃料化学学报(2022年5期)2022-05-30扰动输入时偏差传递函数计算方法探讨科教导刊·电子版(2022年5期)2022-03-19一种三相无源逆变电源供电方案设计电子制作(2019年12期)2019-07-16基于LabVIEW的火焰传递函数测量系统测控技术(2018年7期)2018-12-09基于PCH模型的航天器姿态无源控制北京航空航天大学学报(2017年6期)2017-11-23红外成像系统的调制传递函数测试光学精密工程(2016年4期)2016-11-07无源互调干扰对TD-LTE系统的影响研究互联网天地(2016年2期)2016-05-04一种温和环醚开环成双酯的新方法合成化学(2015年4期)2016-01-17基于开环补偿的飞机偏航角控制系统设计及仿真海军航空大学学报(2015年1期)2015-11-11新型无源无损软开关Cuk变换器的研制电测与仪表(2015年13期)2015-04-09






