磁阻驱动微定位台复合前馈控制与教学应用*
时间:2023-06-22 14:15:03 来源:雅意学习网 本文已影响 人 
周 俊,陆晓伟,赖磊捷
(1.上海工程技术大学 机械与汽车工程学院,上海 200240;
2.华立科技股份有限公司,浙江 杭州 310023)
随着纳米技术、生物技术、信息技术和先进制造技术的飞速发展,纳米精度运动和定位技术在微纳制造装备、超精密加工机床、高端光电装备、扫描探针显微镜和微纳操作机器人等领域得到广泛而重要的应用[1-4]。各领域的不断发展也对纳米定位的行程范围、自由度以及控制带宽和精度等方面提出了越来越高的要求。基于压电陶瓷的纳米定位平台具有纳米级定位精度,但其行程一般只有几十微米[5]。近年来,以磁阻电机等为代表的电磁直驱技术可以通过改变线圈的电流大小控制电磁力而实现精确的位移输出,可以满足大行程高精密的定位需求,同时该类驱动器也存在着无摩擦、结构紧凑、体积小、运动灵敏度和分辨率高等优点[6]。结合柔性机构无摩擦、无间隙等突出性能,基于磁阻驱动和柔性机构的纳米定位平台在大行程高速纳米定位技术中具有极大的应用潜力。
然而,磁阻驱动器复杂的动力学特性及低刚度柔性机构容易产生较低的谐振和反谐振频率等问题,导致平台容易出现零极点漂移、自激振荡等影响系统定位精度、动态品质和控制带宽的问题。为了解决这些问题,本文设计了相位超前PI反馈控制器,并与前馈控制器共同使用,增加了系统的相位裕度,实现了系统的高精度控制。另外,鉴于本文所设计的微定位平台控制系统软、硬件清晰,控制对象明确,学生可以较为方便地直接利用Simulink进行控制算法的设计,因此本文所搭建的微定位平台控制系统也可作为大学控制理论相关课程的实验平台使用,使学生在学习理论知识的同时,对各章节的内容能够进行实践验证。
麦克斯韦驱动柔顺微定位系统如图1所示。微定位平台中,麦克斯韦驱动电机被用来驱动双平行四杆柔性机构以实现较大行程范围的直线精密运动。磁阻驱动器由一段长度较短、材料和磁轭相同的金属块作为动子,一个相对较大的C型磁轭作为定子,以及一个由钕铁硼(Nd-Fe-B)制成的永磁体和两个励磁线圈组成。驱动器整体结构对称,由两组相同的C型环路组成,增加了在相同电流时的驱动力F。初始位置时,动子位置x=0 mm,气隙长度x0=2.5 mm,永磁体提供偏置磁场,以改善驱动器磁路。双平行四杆柔性机构梁的长度l、宽度b、厚度h分别为60 mm、15 mm和1 mm,其弹性模量E=717 GPa,机构的整体刚度k=2Ebh3/l3=60.1 N/mm。

图1 麦克斯韦驱动柔顺微定位系统
基于xPC Target的微定位平台硬件在回路半实物仿真系统中,采用美国Trust公司的TA115线性放大器将数据采集卡的输出电压(-10 V~+10 V)线性转换为驱动器的驱动电流(-8 A~+8 A)。平台位移由激光位移传感器(HL-G103-S-J)进行测量,该传感器能够实现±4 mm的测量范围,对应0 V~10 V的模拟量输出,测量分辨率为0.5 μm。采用NI公司的PCI-6221数据采集卡来采集反馈电压和输出电压。
本文拟采用相位超前PI+前馈控制的复合控制方法实现微定位平台的高速轨迹跟踪。首先对微定位系统进行了系统辨识,根据辨识结果,设计了含相位超前环节的PI反馈控制+动力学前馈的复合控制策略,以提升系统的幅值裕量和相位裕量,提高系统稳定性。
2.1 系统传递函数模型辨识
选择幅值为1 V、频率为0 Hz~1 000 Hz的chirp信号作为平台输入信号[7],使用MATLAB系统辨识工具箱ident对平台的输入、输出数据进行处理,得到最终的系统动力学模型:
(1)
2.2 相位超前PI控制器
首先根据校正前系统开环增益和校正后系统的静态速度偏差要求,确定控制器增益为Kc=5.5,增益调整后的未校正系统伯德图如图2所示。

图2 开环增益调节Bode图
由图2可知,系统的开环传递函数G(s)的相位裕量只有0.012°,过小的相位裕量使得平台的稳定性较差,调整时间过长,极大地影响了跟踪精度。
增益调整后的未校正系统的相位裕量为γ1=0.012°,设定期望的相位裕量γ=40°,可确定超前校正控制器的相位超前角θ=γ-γ1+θc=43°(其中θc=3.012°为超前校正环节引起的系统剪切频率右移产生相角变化的补偿量)。由α=(1-sinθ)/(1+sinθ)得到校正后系统开环增益衰减倍数α值为0.19,根据-10lg(1/α)的值,在系统Bode图中找到该值对应的横坐标,即为所对应的频率ωm=3 769.91 rad/s,求得超前校正控制器转角频率对应时间常数为:
(2)
由此可得相位超前校正环节的传递函数为:
(3)
为了消除系统的稳态误差,在相位超前环节的基础上增加了PI控制器,积分环节中时间常数Ti=1/50的选择,使得其对系统相位裕量的影响降到最低,保证了相位超前控制器设计的有效性,最终得到含相位超前环节的PI反馈控制器的传递函数为:
(4)
如图2所示,校正后开环系统相位裕量大于32.7°,能够满足平台全行程范围内的稳定性和精度要求。
2.3 前馈控制
逆模型前馈控制是通过加入控制对象的逆模型Gp=G-1从而实现对期望轨迹精确跟踪的控制方法,逆模型前馈控制原理如图3所示。
图3 逆模型前馈控制原理图
由图3所示原理图可以得出如下结论:
(5)
当Gp=G-1时,Yr(s)=Yd(s),稳态误差被完全消除。
为了验证所设计控制器的有效性,分别使用PID控制、传递函数逆模型前馈控制、含相位超前的PI控制等控制方法,对频率为20 Hz、幅值为8 V(对应行程为2.5 mm)的三角波信号进行跟踪对比实验。实验结果如图4所示。其中,前馈控制器已经由上一节求出,PID控制器利用ZN法进行参数调整,最终kp=2,ki=0.02,kd=0。
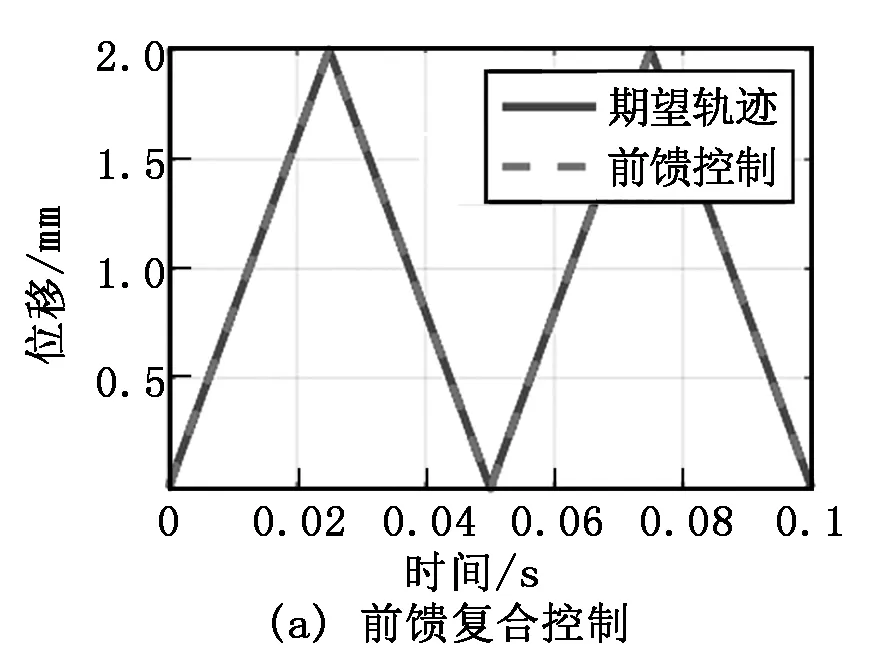
图4 20 Hz三角波跟踪效果
由上述实验结果可以清晰地看出,控制器之间的差异明显,所提出的相位超前PI+前馈控制器的跟踪性能最好,始终保持较高的跟踪精度,且在20 Hz的三角波信号跟踪过程中并未发生谐振;
利用PID控制器时在三角波峰值处时发生谐振,可见利用PID控制器对阻尼较小的微定位柔顺定位平台进行控制,仍旧有较大缺陷。
本文提出使用复合相位超前PI前馈方法来实现麦克斯韦驱动柔顺微定位平台的高速、高精控制。首先搭建了麦克斯韦驱动双平行四边形柔性机构微定位平台,对其进行了动力学建模和系统辨识,并以此为依据设计了前馈复合控制方法来改善平台的稳定性与快速性。最后使用该方法与其他常规控制方法对不同频率三角波轨迹进行了跟踪实验,验证了所提出方法的有效性。同时,本文所搭建的定位平台及其控制系统涉及到系统建模、时域和频域响应、稳定裕量、控制系统校正等内容,本科生和研究生在学习控制理论相关课程时,可以利用本实验平台进行相关理论的学习和实践,可见本文所设计的实验平台也能够较好地应用于高校控制类课程的配套实验中。
猜你喜欢磁阻驱动器增益新型轴向磁通永磁辅助磁阻电机研究大电机技术(2022年5期)2022-11-17永磁磁阻电动机的研究防爆电机(2021年4期)2021-07-28基于增益调度与光滑切换的倾转旋翼机最优控制北京航空航天大学学报(2021年6期)2021-07-20藏起驱动器号确保数据安全电脑爱好者(2020年6期)2020-05-26基于单片机的程控增益放大器设计电子制作(2019年19期)2019-11-23基于Multisim10和AD603的程控增益放大器仿真研究电子制作(2018年19期)2018-11-14基于磁阻传感器的车载型磁电子罗盘的设计电子制作(2018年19期)2018-11-14空间大载荷石蜡驱动器研制北京航空航天大学学报(2017年5期)2017-11-23压电陶瓷驱动器的迟滞特性光学精密工程(2016年5期)2016-11-07程控增益射频宽带放大器电子制作(2016年1期)2016-11-07






