基于行驶稳定性的电动汽车四轮驱动控制算法
时间:2023-06-16 18:55:04 来源:雅意学习网 本文已影响 人 
王中辉,唐 焱
(桂林电子科技大学 机电工程学院,广西 桂林 541004)
随着经济、文化的快速发展,人们对物质、精神生活的要求大幅提高,对轿车出行的安全、舒适、环保问题提出了更高的要求。电动汽车具有良好的经济性、环保特性,以常规伺服电机为动力的各类车型在国内具有较大规模的应用市场,在新能源汽车商品化开发领域占有重要地位。由于车载电池容量的有限性,开发电动汽车的高效率电源管理及动力分配控制系统,已成为在确保动力前提下提高车辆操纵稳定性的重要途径[1]。
轮毂电机是现代制造业中集机、电、算等学科先进技术于一体的高度集成产物。高品质轮毂电机具有可靠性高、调速范围宽、输出扭矩大、效率高、噪声低等优势[2],应用于电动汽车可大幅度简化动力传动系统结构,符合车辆轻量化设计要求,并为进一步提升车辆动力性、经济性奠定基础。轮毂电机独立控制输出扭矩,若配合驱动控制算法,可依据路况环境、车辆行驶状态,实现轿车四轮驱动力的优化组合。相关研究表明[3-4],实时智能化控制四轮纵向力能充分发挥行驶车轮的附着效能;依据路况、车况制订控制策略对四轮纵向力进行规划及优化组合,可有效抑制动态车辆车身质心侧偏角、横摆角速度,从而提高车辆操纵稳定性,保障行车安全,并使驾乘人员获得更好的乘车体验。
针对轮毂电机的控制问题,在现有车辆智能驱动系统基础上,根据不同路面附着条件,针对单侧驱动轮由于过度滑转导致的行驶路线偏移问题构建车辆仿真模型,并对四轮驱动力矩进行优化分配控制,以提高车辆的行驶稳定性。
1.1 车辆参考模型的建立
横摆角速度和质心侧偏角是评估车辆行驶状态操纵稳定性的重要指标,以他们为控制量,可实现对车身航向角变化率及相对预定行驶轨迹的偏离程度的控制。设计时忽略悬架的影响,在车辆三维坐标系中对四轮汽车进行简化,只考虑3个方向的运动,即沿x、y轴方向及绕z轴的摆动。简图采用线性三自由度参考模型[5],整车的简化模型如图1所示。

图1 整车的简化模型
当车辆直线行驶时,φ趋近于零,则有

其中,φ1、φ2、φ3、φ4分别表示直线行驶状态下左前轮、右前轮、左后轮、右后轮的侧偏角。
当车辆曲线行走时,只考虑车辆的横摆、侧向运动,则横向力

其中:kj为侧偏刚度;αj为侧偏角。后轮和前轮侧偏角:
其中:β为质心侧偏角;a为前轮至质心距离;b为后轮至质心距离。忽略车轮滚动时的阻力矩,此时电动汽车的驱动轮旋转动力学方程:
其中:Fxj为车辆车轮所受的纵向力;Ij为车轮的转动惯量;ωj为车轮旋转角速度;Tj为轮毂电机驱动轮力矩;R为车轮半径。根据牛顿第二定律及整车简化模型,可得整车沿x轴、y轴及绕z轴的运动方程:
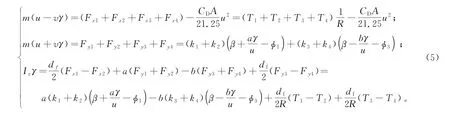
其中:m为车辆总质量;CD为风阻系数;A为迎风面面积;u为车辆质心沿x轴方向的速度分量;v为车辆质心沿y轴方向的速度分量;γ为横摆角速度。在车辆行驶过程中,在保证行驶速度的前提下,合理分配四轮的驱动扭矩,将横向速度减至零[6]。
1.2 模糊PID控制器设计
由于车辆的质心侧偏角β与横摆角速度γ存在非线性耦合关系,行驶状态二者的期望值相互关联[7],不易对其期望控制状态进行分别控制。综合考虑β、γ对行驶稳定性的影响,制定如下控制策略:当β较小时,仅需控制γ趋于期望值;当β增加且低于上限时,车辆仍处于稳定状态,采用加权系数对β、γ进行联合控制;当β过大时,则主要控制β,求得横摆力矩:

根据文献[8]确定β1为2,β2为5,分别根据β、γ设计相对应的模糊控制器,根据式(6)求出输出力矩。
在模糊PID控制器设计中,Δγ为横摆角速度γ与期望值的差值,选取横摆角速度变化率与Δγ的差值作为模糊控制的输入,附加力矩Mω作为输出。将它们分别转化为论域为Δγ[-1.5,1.5],[-0.15,0.15],Mω[-1,1]的集合。模糊处理过程中,3者的模糊语言为“正大”(PB)、“正中”(PM)、“正小”(PS)、“零”(ZO)、“负小”(NS)、“负中”(NM)、“负大”(NB)。依据文献[9]设计49个模糊规则。设定车辆在转向时横摆力矩对γ为正增益,当Δγ及正向增大时,增大反向输出力矩Mω;当β很小时,横摆力矩与质心侧偏角成正比,随着β增大,车辆慢慢进入失稳状态,则横摆力矩与β成反比。具体规则如表1、2所示。

表1 质心侧偏角β的模糊PID控制规则
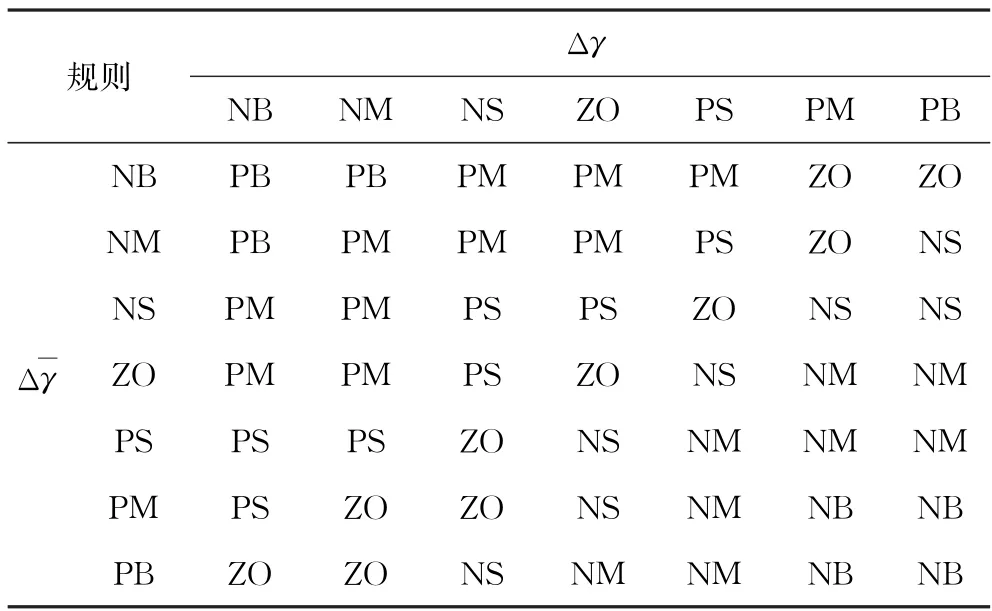
表2 横摆角速度γ 的模糊PID控制规则
采用Mamdani法进行模糊推理,采用重心法求解模糊[10],转矩分配优化策略整体框架如图2所示。
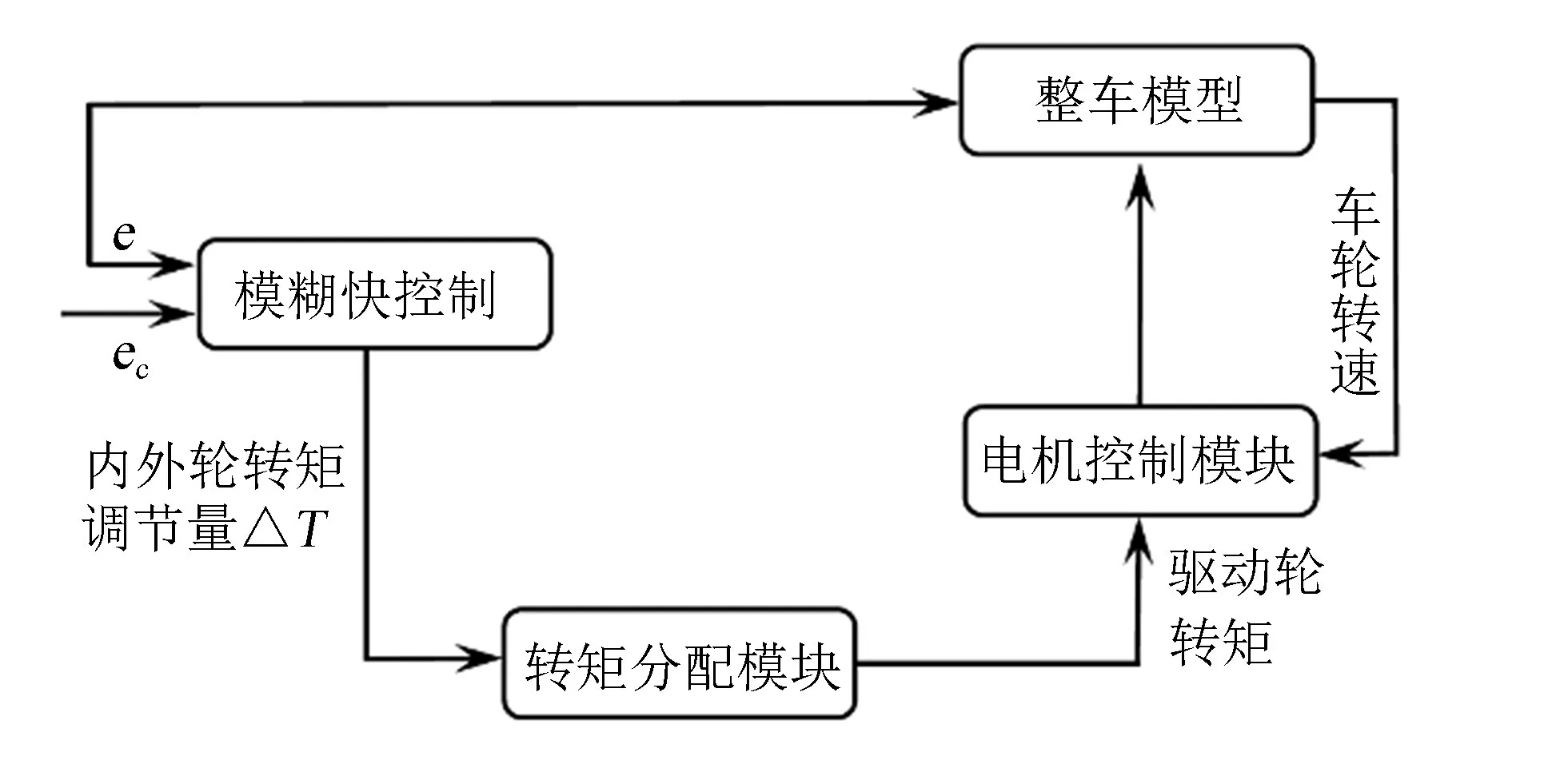
图2 转矩分配优化策略的整体框架
2.1 自适应权重的粒子群算法原理
粒子群算法(partical swarm optimization,简称PSO),具有搜索速度快、效率高、占用空间小等特点[11]。迭代寻优计算可有效对系统多目标进行优化组合,在汽车电子领域广泛应用。由于常规PSO 存在局部寻优能力相对弱等问题,研究中将自适应控制技术引入PSO算法,诱导目标函数值尽可能靠拢适合的搜索区域,可有效弥补算法自身的不足[12]。在处理电动汽车四轮独立驱动优化控制方面,采用基于自适应权重的PSO算法寻优结果对解决问题更具针对性。
2.2 平均分配力矩
在理想行驶状态下,车辆四轮采用平均分配原则,可使4个车轮的纵向力对质心处产生大小相等的力矩。因各类偶然因素,行驶过程中车辆出现横摆力矩可能存在失稳隐患,应及时分别改变4个车轮纵向力,使其组合效应产生反向附加横摆力矩,达到维持行驶稳定的效果[13]。
定义驾驶员左侧、车辆前进方向均为正,力矩分配规则:

其中:TLj为左车轮第j轴的转矩;TRj为右车轮第j轴的转矩;M为附加横摆力矩;Tx为轨迹模型得到的总纵向驱动力矩。
2.3 基于粒子群优化算法的优化分配
车辆行驶过程中影响稳定性的控制变量较多,选用较为简单且模糊向量较好的模糊PID控制器对车辆转矩分配控制。以实际四轮及当前车速作为模糊PID控制的输入,以经粒子群算法优化后车辆输出的横摆角速度作为输出。模糊PID控制策略的原理如图3所示。

图3 模糊PID控制原理
在模糊PID 控制器中,对于系统控制效果而言,Ki、Kp、Kd这 3个参数的合理选择起决定性作用。在控制器的设计过程中,很多情况下Ki、Kp、Kd根据经验通过反复调试获得,可在一定程度上提高参数值选择的客观性。因此,采用自适应权重的粒子群算法对模糊PID控制器参数进行优化设计[14]。
模糊PID控制器的各组参数由粒子群中的每个粒子代表,优化后的模糊PID 控制器结构如图4所示。为了实现系统控制的最优化效果,采用自适应权重的PSO算法对模糊PID 控制器的参数Ki、Kp、Kd进行实时动态调整。其中,r(t)为系统的输入信号,e(t)为控制器的偏差信号,u(t)为控制器的输出信号,c(t)为被控制对象的输出信号[15]。

图4 粒子群优化模糊PID控制框图
3.1 联合仿真建模
在进行联合仿真验证过程中,利用MATLAB/Simulink在模型构建及策略控制方面的优势,建立电机和控制策略等模型,并将其作为实际控制对象在Adams/Car中验证有效性。在Adams/Car中建立车辆模型,设置仿真条件,在Simulink中建立控制模型。其中,仿真软件可把仿真车辆的动力学响应直观形象地呈现出来,也可把其中的参数通过绘图的方式进行表现并输出,供研究人员分析[16]。
为降低建模工作量,做以下假设:
1)直接调用Adams/Car中的传统车型,去除原车的制动系统、驱动系统,将其修改为电动汽车,相关模块引起的质量变化理论上可以忽略;
2)忽略机械制动系统动态特性的影响,假定分布的摩擦制动力满足试验条件[17];
3)不考虑道路坡度对轴载的影响,同时忽略摆震及扭振的影响。
根据相关标准、国内典型电动汽车及Adams/Car中的车型,车辆核心部分并不涉及控制对象的具体参数,策略的适用对象也不局限于某种车型[18]。选用最接近的车辆模型并对其部分基本参数修改设置,确定整车的部分参数,如表3所示。
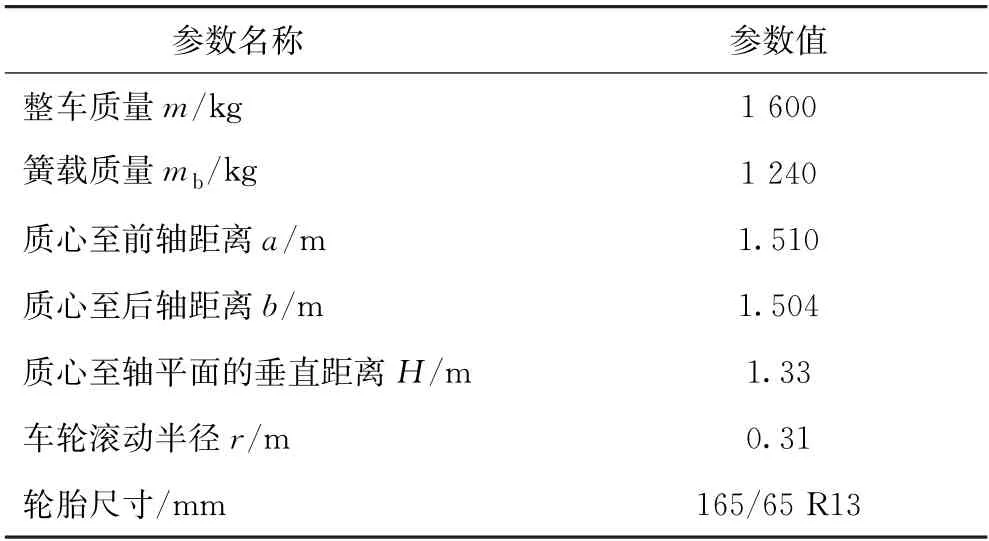
表3 仿真车数部分关键参数
3.2 试验设计及边界分析
将仿真软件自带整车模型中部分模型替换为由轮毂电机驱动的驱动系统,配置Adams/Car的Adams Controls Plant Export的联合接口,设置输入量、输出量、目标软件等[19],用MATLAB软件进行联合仿真。接口模块如图5所示。
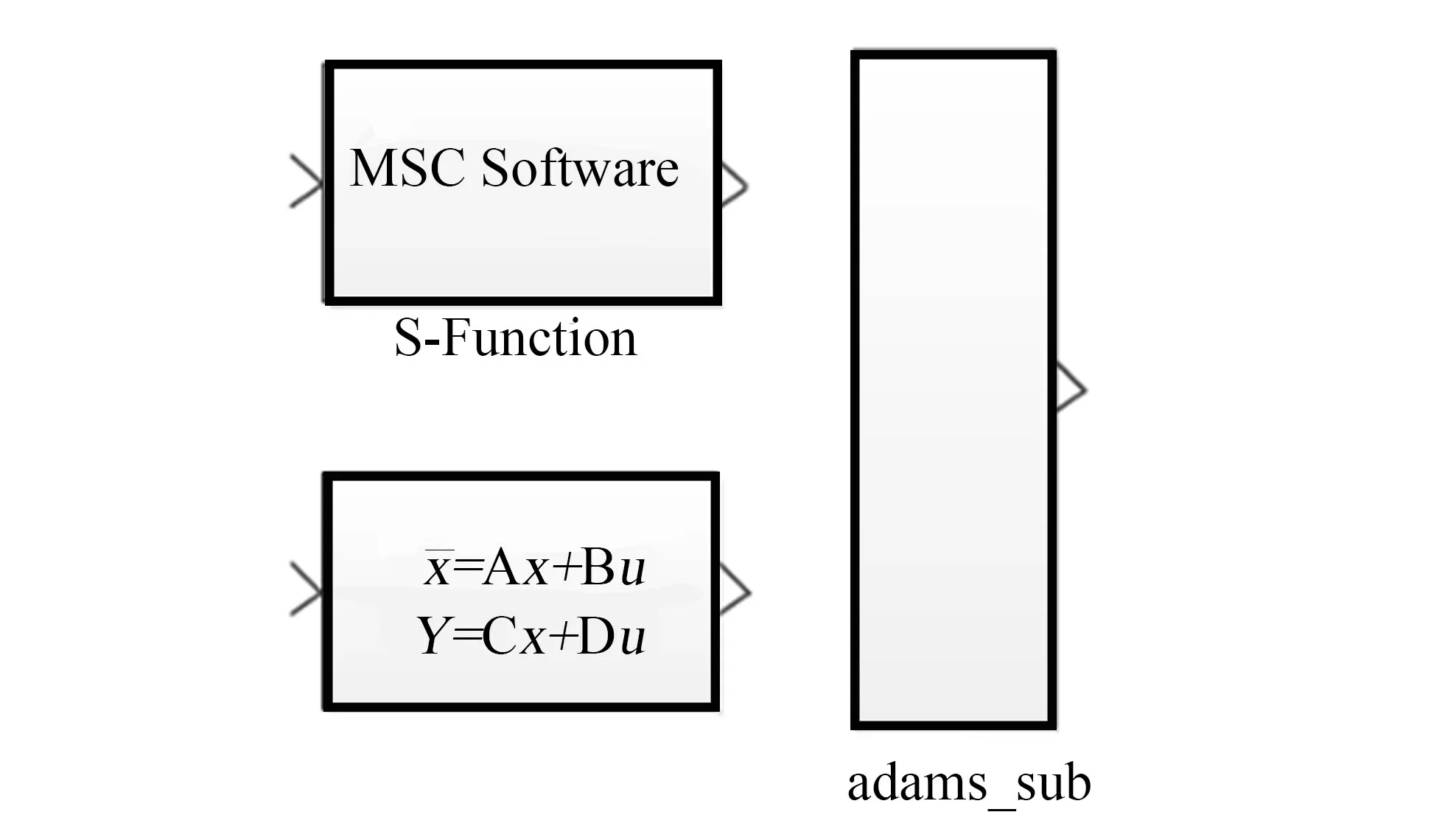
图5 Adams/Simulink联合接口模块
在典型工况下进行仿真试验分析,如单移线试验等在Adams/Car中对仿真模型进行相关参数设置。时间设置为10 s,档位设置为五档,速度设置为80 km,其余为默认。取开环转向事件下的蛇形仿真试验,在Adams/Car的后处理界面生成对比图,并在不同路面附着系数条件下进行试验。
3.3 数据采集及处理
为从多方面对轮毂电机四轮驱动车辆的操纵稳定性进行评估,采用开环转向事件下最具有代表性的蛇形工况来进行仿真试验[20-21]。在高、低2种附着系数路面进行试验。
3.3.1 低附着路面仿真结果
将附着系数设置为μ=0.3,此时为低附着仿真路面,对设计的优化分配方案和平均分配工况进行对比分析,结果如图6所示。

图6 μ=0.3时不同控制系统下的控制效果
如图6(a)所示,在平均分配情况下,从1.3 s开始,车辆质心侧偏角产生偏差,并逐渐增大且不稳定,且偏差急剧增大;对优化分配与平均分配的曲线进行分析,发现优化分配方案由于施加了模糊控制,从1.5 s开始对β产生一定的抑制作用,且效果明显,车身质心侧偏角峰值处降低约50%。
如图6(b)所示,在平均分配情况下,车辆横摆角速度在接近2 s时开始出现逐渐增大的波动,且总的波动幅度过大;在优化分配时,与平均分配对比,发现从2 s开始,由于优化分配方案加入了模糊控制,从而对横摆角速度产生了抑制作用,且效果明显,车身横摆角速度峰值处降低约31%。
3.3.2 高附着路面仿真结果
当附着系数为μ=0.3时,此时为高附着仿真路面,对优化分配和平均分配进行对比,结果如图7所示。

图7 μ=0.7时不同控制系统下的控制效果
如图7(a)所示,在平均分配情况下,车辆质心侧偏角在1.1 s开始产生偏差并逐渐增大且不稳定,且偏差急剧增大;对优化分配与平均分配的曲线对比分析,发现优化分配方案由于施加了模糊控制,从1.5 s开始对β出现一定的抑制作用,且效果明显。通过二者对比发现,车身质心侧偏角峰值处降低约46%。
如图7(b)所示,在平均分配情况下,车辆横摆角速度在将近1.5 s时出现逐渐增大的波动,且总的波动幅度过大;优化分配与平均分配对比发现,从第2 s开始,由于优化分配方案加入了模糊控制,对横摆角速度产生了抑制作用,且效果明显。通过二者对比发现,车身横摆角速度峰值处降低约40%。
对轮毂电机电动汽车的四轮智能驱动控制系统进行设计,首先设计基于模糊PID的驱动控制器,制定横摆力矩及纵向力,然后运用粒子群优化算法实时优化控制行驶车辆四轮扭矩,进一步实现车辆行驶状态四轮纵向力控制优化组合。目标车型在高开环蛇形工况、低附着系数路面的仿真结果表明,在不影响动力性、经济性的前提下,车身质心侧偏角、横摆角速度峰值预期平均减小30%以上,极大提高了车辆行驶稳定性。
猜你喜欢 偏角质心角速度 重型半挂汽车质量与质心位置估计汽车实用技术(2022年14期)2022-07-30基于GNSS测量的天宫二号质心确定北京航空航天大学学报(2021年4期)2021-11-24翼吊长涵道发动机短舱内偏角优化和机理研究民用飞机设计与研究(2020年4期)2021-01-212018全国Ⅱ卷选修3-4中偏角的解法探讨新课程·中学(2019年7期)2019-09-17欧姆表偶然误差分析物理教学探讨(2018年1期)2018-02-13圆周运动角速度测量方法赏析中学生数理化·高一版(2017年3期)2017-07-08半捷联雷达导引头视线角速度提取火控雷达技术(2016年1期)2016-02-06基于局部权重k-近质心近邻算法应用科技(2015年5期)2015-12-09基于构架点头角速度的轨道垂向长波不平顺在线检测中国铁道科学(2015年4期)2015-06-21基于卡尔曼滤波器侧偏角估计的电动汽车电子稳定控制系统汽车文摘(2014年10期)2014-12-13






