基于机器视觉的位移检测算法
时间:2023-06-12 14:20:25 来源:雅意学习网 本文已影响 人 
穆莉莉, 汪晨灿, 储 汇, 宋 陈
(安徽理工大学 机械工程学院, 安徽 淮南 232001)
国内外楼宇或家庭车库卷闸门一般采用射频或摄像头识别车牌,手动遥控卷闸门的启停或自动启停,但目前多数不能实时监控卷闸门的开度,即不能实时监控位移状态并进行远程客户端控制。根据市场跟踪与调研,用户提出了非接触位移监控系统的迫切需求,由于卷闸门提升电机为密封件,不可拆装,无法安装位移传感器,传统的位移检测方法无法采用,结合国外客户需求提出一种基于IPC摄像头的位移实时检测系统。由于卷闸门开启为全天候环境,白天强光、夜晚弱光或黑暗,甚至雾天、雨天、障碍物等对图像造成极大的影响,对图像位移跟踪算法的稳定性和识别精度提出了极高的要求。本文针对光照、障碍物等干扰环境下的标签选择、图像处理、标签捕捉与跟踪等图像算法进行了研究。
卷闸门一般为灰色或白色,边缘和内部均没有清晰的特征点,在门不被破坏性处理条件下,本文通过设计一种特殊标签作为特征点进行标记。标签材质的选取要考虑光线对其影响,弱光、强光或者黑暗状态下都能够保持可追踪性,同时还要考虑其他颜色对标签识别的干扰。针对不同光照条件下各种标记物的捕获特性,选用对光线的吸收效果好带有颗粒的纯黑色标记物,避免了反射、折射等不利影响,以保证图象质量最佳。IPC摄像机和黑色标签安装结构如图1所示。

图1 IPC摄像机和黑色标签安装结构
标签的识别追踪分别经过灰度图像转化、高斯模糊、二值化、腐蚀、膨胀等几个预处理步骤,最后再对带有特征信息的物体进行追踪,图像预处理步骤如图2所示。

(a)灰度转换 (b)高斯模糊 (c)腐蚀 (d)膨胀
捕捉到的第一帧图像为彩色图像,处理计算量较大,首先进行灰度转化,然后进行高斯模糊进一步降低对比度,使灰度像素过渡更加平稳。为减少数据维度,排除原图中噪声带来的干扰凸显有效区域的轮廓范围,使图像呈现明显的黑白效果。本文采用了全局固定阈值函数来实现图像的二值化处理,设置RGB全局阈值T,图像中所有像素点统一使用同一个固定阈值。使用一维Means方法寻找二值化阈值:

(1)
式中:f(x,y)为图像RGB值;
g(x,y)为处理后的灰度值[1-3]。
腐蚀膨胀在图像处理中的主要作用是消除噪声分割出独立的图像元素,在图像中连接相邻的元素。膨胀寻找图像中明显的极大值区域,腐蚀寻找图像中明显的极小值区域,求出图像的梯度[4]。标签为纯黑色,在进行腐蚀膨胀时先进行灰度翻转,变为白色高亮,如图2(c)和图2(d)所示。
2.1 KCF追踪器
KCF(Kernel Correlation Filter)追踪器采用核相关滤波算法[5],无论是在跟踪效果还是跟踪速度上表现都十分出色。本文选用KCF追踪器进行标签追踪。KCF追踪算法利用目标函数f(z)=ωTz求最小化采样数据与下一帧真实目标位置的距离[6]:
(2)
对式(2)求解并引入高斯函数φ(x)核函数[7],将ω的解转化为高维权值得到:
(3)
式中:Kxx表示核矩阵的第一行元素;
^表示矩阵的傅里叶变化。
利用采样样本与训练相似样本的核矩阵将二者做相关操作得到频域中响应值为:
(4)
再通过傅里叶反变化将式(4)转化到时域中找到最大值。KCF算法通过对模板更新实现对目标的追踪:
(5)
式中:β为学习因子[8]。
2.2 位移监测算法
为进行标签的精确捕捉与追踪,对图像进行抗干扰处理。系统首先获取标签初始位置在空间坐标中的定位A和B角点坐标分别为A(x,y)和B(x+w,y+h)。标签的初始坐标及运动坐标如图3所示。
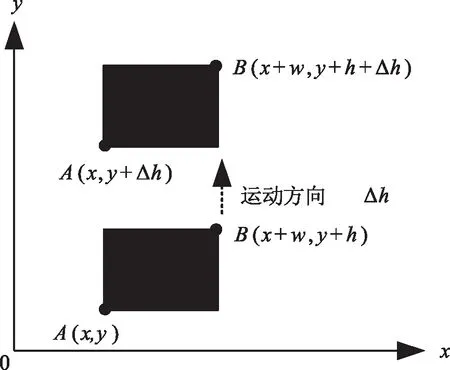
图3 标签的初始坐标及运动坐标
设位移图像上所测标签位移为△H,基于线性放大原理,计算得出物体的实际位移。
(6)
式中:h为图像标签的高度;
H为实际标签高度。
进行抗干扰处理前,对图像进行了裁切处理。对原图像左边裁切m下方裁切n,即以(m,n)为新的坐标原点。设裁切处理后的标签左下角坐标为A(x,y),将坐标轴还原到原坐标中,如图4所示。

图4 坐标转化
因坐标系不同需首先进行坐标转换,即坐标补偿原点O1在原坐标轴中的坐标为(m,n),A(x,y)点还原到原坐标中坐标进行补偿应为A(x+m,y+n)。同理应用到所有的坐标转化中。
2.3 基于KCF追踪器的位移监测软件实现
基于KCF追踪器构建追踪目标实时监测系统,系统程序结构框图如图5所示。系统内部设置KCF追踪器,打开系统检测摄像机是否开启并获取第一帧图像,对捕捉到的第一帧图像进行图像预处理。系统对预处理后的图像进行边缘检测,图像边缘信息主要集中在高频段,图像锐化或检测边缘实质就是高频滤波,微分运算是求信号的变化率,具有加强高频分量的作用[9],由于数字图像为离散信号,微分运算就变成计算差分或梯度[10]。图像处理中有多种边缘检测(梯度)算子,本文选用Canny边缘检测算子,相比普通的梯度算法,Canny算子抑制了噪声引起的伪边缘且边缘细化便于后续的画框处理[11-12]。KCF追踪器利用对模板的不断更新实现对目标持续追踪并对坐标位置不断更新,计算得到提升机的实际位移并进行远程传输。

图5 系统程序结构图
基于Python3和OpenCV-3.4.1.15构建物体追踪位移系统,针对不同光照环境、环境中的干扰物体及摄像机位置进行了追踪实验与位移监测。实际卷闸门标签实验场景如图6所示。

图6 实际卷闸门标签实验场景图
3.1 光照及物体干扰下的目标捕捉与追踪
选用90 mm × 90 mm规格带有纯黑色哑光颗粒标签作为目标标签,选取红外摄像机为型号850清晰度为1 080 p,具有红外补光特性。进行了若干组实验,设置了不同的光照强度下的标签颜色阈值,如表1所示。

表1 不同光照条件下的颜色阈值
卷闸门开启后,外部存在各种物体形成特征点,滤除不同颜色噪声后,系统对不同大小的干扰物体进行滤波。针对实际标签大小选用核为3×3进行腐蚀膨胀操作,为最大程度上滤除噪声,达到最佳捕获效果,本文通过多次对图像进行腐蚀操作将图像中阈值选取范围内未能进行滤除的噪声进行滤波处理。通过腐蚀膨胀次数的调整可以更好地去除噪声,更加精准地对标签进行捕捉得到更精确的位移数据。经过不同次数的腐蚀膨胀后的二值图像如图5所示。最终利用边缘检测算法捕捉目标标签。

(a)灰度图 (b)3次腐蚀

(c)15次腐蚀 (d)15次膨胀
不同光照条件下提升机标签捕捉情况如图8所示,夜晚照度约为0 lx,白天正常光照约在100 lx,卷闸门打开强光约在1 000 lx。不同光照条件下,不同的干扰标签系统都能精准捕捉到。

(a)0~1 lx(夜晚) (c)500 lx

(b)100 lx (d)1 000 lx
3.2 摄像头位置对位移监测的影响
摄像头与运动物体之间的距离对测量结果影响较大,如图9、图10所示。由于摄像头的拍摄画面受摄像头的焦距的影响,距离会影响标签的捕捉精度。当摄像头在同一高度时标签与摄像头的水平距离会影响系统的测量精度,同时摄像头的安装高度也会影响测量的精度。白天和夜晚环境下卷闸门运行1 m行程的测量误差分别为表2和表3所示。

图9 白天环境下的距离对测量结果的影响图10 黑夜环境下的距离对测量结果的影响
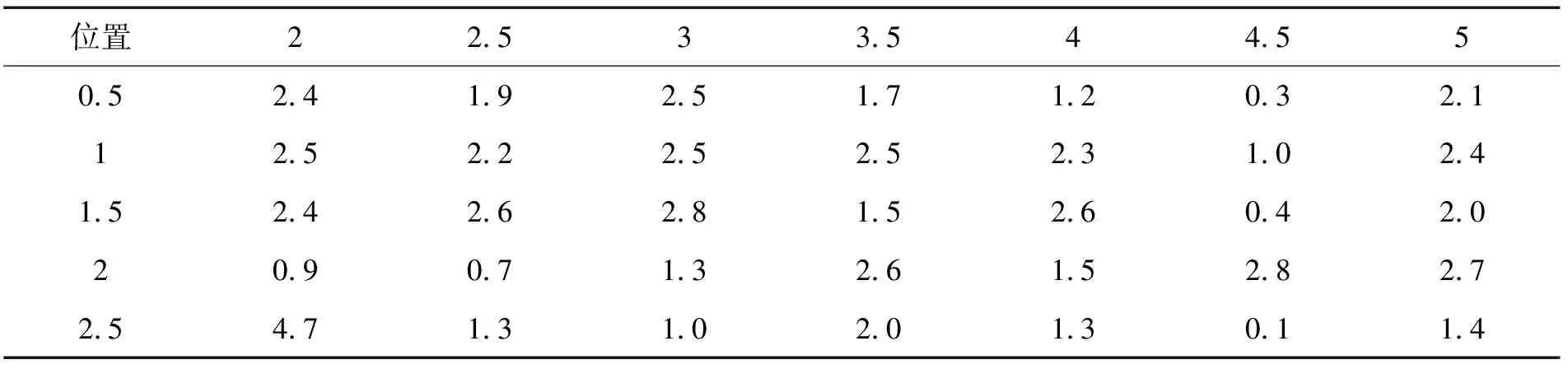
表2 白天物体位移1 m位移测量平均误差 单位:%

表3 夜晚物体位移1 m位移测量平均误差 单位:%
综上,实际系统中选用90 mm × 90 mm规格的纯黑色颗粒标签作为目标标签,安装于卷闸门底部居中位置,摄像机安装在4.5 m × 2.5 m(高×长)位置最佳。
针对物体追踪问题,利用了OpenCV视觉库中的KCF追踪器对物体进行实时追踪将其与位移算法相结合,基于单目相机提出一种针对卷闸门运作过程实时位移监测的物体追踪位移监测系统。设计的物体位移监测系统可适用井下采煤机等机器的实时位移监测方便对井下实时工作状况的了解。
猜你喜欢 灰度摄像头标签 浙江首试公路非现场执法新型摄像头中国交通信息化(2022年9期)2022-10-28采用改进导重法的拓扑结构灰度单元过滤技术北京航空航天大学学报(2022年6期)2022-07-02摄像头连接器可提供360°视角图像汽车工程师(2021年12期)2022-01-18Bp-MRI灰度直方图在鉴别移行带前列腺癌与良性前列腺增生中的应用价值天津医科大学学报(2021年1期)2021-01-26无惧标签 Alfa Romeo Giulia 200HP车迷(2018年11期)2018-08-30不害怕撕掉标签的人,都活出了真正的漂亮海峡姐妹(2018年3期)2018-05-09基于最大加权投影求解的彩色图像灰度化对比度保留算法自动化学报(2017年5期)2017-05-14让衣柜摆脱“杂乱无章”的标签Coco薇(2015年11期)2015-11-09科学家的标签少儿科学周刊·少年版(2015年2期)2015-07-07奔驰360°摄像头系统介绍汽车维修与保养(2015年8期)2015-04-17






