基于视觉导航的车载智能驾驶系统研究
时间:2023-05-27 12:45:13 来源:雅意学习网 本文已影响 人 
宋乾毓 蔡丹丹 李肖夏 田 斌
(中汽研汽车检验中心(广州)有限公司,广东 广州 511300)
汽车是人们出行的一种主要工具。由于汽车数量不断增加,因此出现交通堵塞、交通事故等问题,为了能够解决上述问题,研究人员进行了许多尝试和探索。目前,人工智能技术、互联网+技术等广泛应用于各行各业。在汽车领域中,智能驾驶已经成了未来发展的一个主要方向。在汽车行驶的过程中,驾驶员获得的大部分信息(例如路面状况信息、交通标志信息以及障碍物信息等)都来自其自身的视觉,如果可以模仿人类的视觉系统来了解路面环境,就可以辅助人们进行汽车驾驶,从而提高汽车行驶的安全性,降低发生交通事故的概率。
该文对基于视觉导航的智能驾驶系统进行的研究是以无人驾驶车辆作为硬件实验平台的。该无人驾驶车辆在环境感知传感器方面配备了前向四线激光雷达、侧向单线激光雷达和摄像头,构成了汽车的双目视觉传感器系统。同时,还在车辆上安装了车辆定位系统[1]。该无人驾驶车辆具有3个智能子驾驶模块,即环境感知模块、规划决策模块以及自动控制模块。其中,环境感知模块主要是指对车辆周围环境进行感知和探索的硬件设备,包括导航系统、高清摄像头以及激光雷达等。规划决策模块的主要功能是对车辆行驶路线进行规划。自动控制模块主要负责在车辆行驶过程中对油门、刹车以及方向盘等机构进行控制。上述所有的硬件设备均采用CAN总线进行连接,通过串口通信的方式进行数据信息交互,车载智能驾驶系统的结构框架如图1所示。
由图1可知,在驾驶过程中,摄像头、激光雷达以及GPS的主要功能是感知车身周围的环境,对采集到的数据进行处理,并传送至路径规划和决策模块,最终由控制模块来完成汽车的各种刹车、转向灯动作,从而实现智能驾驶的目标。
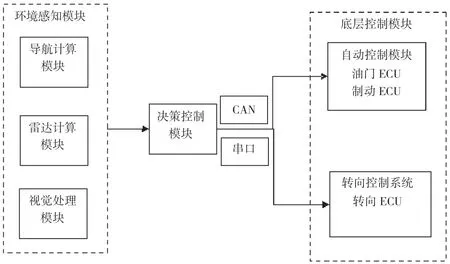
图1 车载智能驾驶系统框架
在智能交通系统中,对行驶路径进行自动寻优是车载智能驾驶系统所必备的一项技术,同时也是车载智能驾驶系统实践应用亟待解决的问题。而作为路径寻优技术中的关键环节,对车道线识别进行系统的研究和开发能够为车辆的自动驾驶提供道路方向、弯曲曲率以及车辆实时行驶的车道线信息等数据。因此,车载智能驾驶系统可以对车道线进行精准识别,从而提高车辆自动驾驶的安全性和可靠性。通常来说,车载智能驾驶系统要想对车道线进行识别,就需要通过安装在车身上的CCD摄像头来采集车道视频流数据信息,并采用相关算法进行分析,得到车道线的数据信息。现阶段有2种不同类型的车道线识别算法:1) 对视频图像进行逐帧分析,再对识别到的车道线进行相应的信息标注。2) 对视频流中的车辆运动矢量数据信息进行分析,在该基础上完成对车道线位置的识别和跟踪工作。
该文通过条件约束来降低道路边缘特征的噪声干扰,并引进光流算法来进行车道识别,以提高车载智能驾驶系统的计算效率。光流算法是一种可以在连续视频帧中进行识别和跟踪的方法。以光流算法为基础的车道线快速识别主要分为以下4个步骤:1) 引入光流算法对车道线的大概范围进行动态性评估,其目的是尽可能地定位感兴趣区域。2) 采用复合算子对道路边缘特征进行计算和检测。3) 利用多项式拟合对车道线进行识别。4) 对车道线的类型进行识别,将识别出的车道线标注到视频图像中。
与传统的车道线识别算法相比,采用光流法能够快速确定车道线的检测范围,提高了车载智能驾驶系统对车道线进行识别的效率。其具体的工作原理是根据图像序列中的像素随着时间域所发生的变化来发现2个相邻帧之间所具有的内在联系,并在该基础上对2帧之间的数据信息进行计算[2]。光流法通过计算每帧中关键特征点的位置就可以实现对正在运动中的物体进行检测和跟踪的目标。该文设计的利用L-K光流法对车道线进行跟踪和识别的流程如下。
首先,在光流算法中添加新的特征点。其次,利用光流法对该特征点进行计算。最后,根据特征点对其进行整理和筛选。
在上述识别车道线的过程中,利用L-K光流法进行计算是该流程中的关键。设定影像灰度保持不变,t处在坐标(x,y)像素点上,那么可以计算t+dt的具体位置为(x+dx,y+dy),在该基础上通过计算可以得到公式(1)。

式中:I(x,y,t)为已知量;
d为常数。
对公式(1)进行泰勒展开,可以得到公式(2)。

将公式(2)写为矩阵公式,如公式(3)所示。

式中:u、v分别为像素坐标系中指向u轴和v轴正方向的位移量。
由公式(3)可知,它具有2个(u和v)不同的变量,如果仅使用1个点,就无法完成对2个变量进行计算的任务,为了解决该问题,引入窗口内像素具有相同运动轨迹的概念,将窗口大小设定为w×w,则该窗口一共具有w2个像素,因此也共计有w2个方程,如公式(4)所示。

采用最小二乘解计算可以得出u和v的值。
在对上一帧车道线进行识别的基础上,采用光流法对视频帧进行计算,对计算结果进行筛选后,得到较精准的坐标点,再对得到的坐标点进行计算,以获取车辆的运动估计[3]。该算法的主要流程如下:1) 对左、右2组坐标点来说,采用DBSCAN聚类算法对其位移矢量进行计算,以去除前景像素,得到主要背景坐标点。2) 采用平均加权法对前方背景图像的相对矢量位移进行计算,如公式(5)所示。3) 在计算得出位移矢量的结果后,对汽车左、右两侧的车道预估曲线进行计算,同时将其设定为系统的感兴趣区域。4) 在系统的感兴趣区域内完成对图像进行二值化、查找汽车行驶车道线像素等任务。

式中:a为前方背景图像的相对位移矢量;
ai为第i组特征像素的相对位移矢量;
si为第i个特征像素和车道拟合曲线的距离倒数;
k为像素。
3.1 车道偏离预警
通常情况下,我国道路上两侧的车道线宽度是恒定的(2条车道线是相互平行的),根据点与直线之间距离最短的原理可以计算车辆中心与左右两侧车道线的具体距离,如公式(6)和公式(7)所示。
式中:DL为车辆与道路左侧车道线的距离;
DR为车辆与道路右侧车道线的距离;
kL、bL为左车道线坐标;
kR、bR为右车道线坐标。
在计算上述距离后,就可以计算车辆中心与两侧车道线中心之间的相对位移D,当车辆左侧偏离2条车道线中心时,其相对位移为负;
当车辆右侧偏离2条车道线中心时,其相对位移为正,如公式(8)所示。

由于在车辆行驶的大部分时间内,车辆的方向和车道线之间都不是平行的,因此,引入偏航角的概念来表示车辆方向和车道线之间的夹角φ,如公式(9)所示。

在不同的道路环境下,道路车道线的宽度是不相同的,这将导致凭借车道线和车辆中心距离以及偏航角来对车道偏离进行预警的智能驾驶系统会出现偏差,为了解决该问题,还需要引入车辆的长、宽数据[4]。LV表示车辆的长度,WV表示车辆的宽度,采用公式(10)计算车辆前部和车辆中心距离在行驶垂直方向的投影L如公式(10)所示。

当L与车左、右两侧车道线的距离DL、DR相等时,表示此时车辆正处于车道线的边缘,而当距离D为负时,表示已经出现左偏离,当距离D为正时,表示已经出现右偏离,如公式(11)所示。

3.2 车辆碰撞预警
为了保障在比较复杂的路况下汽车行驶的安全性,还需要针对车辆碰撞预警系统进行研究。而碰撞预警系统需要对车辆与前方车辆的距离信息进行实时计算,并根据计算出来的距离结果进行碰撞预警提示[5]。要想完成对前向车辆碰撞进行预警的任务,还需要获得车辆距离的三维信息,该文引入视差计算和三维重建的方法来对车辆前方环境进行精准感知。
3.2.1 视差计算
采用WTA算法对车辆碰撞预警中的视差进行计算。WTA是一种可以对路况图像中左侧视图像素点进行匹配并自动选择最优像素点对视差值进行计算的方法,计算后就可以得到对应的三维图像信息。
在采用WTA算法获得的初始视差图中还具有很多匹配错误的点,这就需要对该视差图进行精细化处理,该文选择对其进行左右一致性检测,以提高其匹配的精度。其具体的检测流程为进行左右一致性检测,获取左右视差图中的异常点,如公式(12)所示。

式中:dL(p)为p点在左侧视图中的具体视差值;
dR(p-dL(p))为p点在右侧视差图中的具体视差值。
3.2.2 三维重建视差图计算
为了对视差图进行三维重建,该文利用工业相机构建一个车载智能化测量平台,该平台具有2台相互平行的相机,以确保相机的光轴时刻处于同一平行状态下,设定相机的基线为0.4 m[6]。在工业相机坐标系的基础上建立世界坐标系,并将三维平面向下平移2.3 m(到地面位置),设定工业相机的俯角θ=10°,工业相机的横滚角和偏航角均为0°。在重建三维点云的过程中,使用了4个不同的坐标(像素坐标系、图像坐标系、相机坐标系以及世界坐标系),双目测量系统的坐标系定义如图2所示。

图2 双目测量系统坐标
由双目逆投影的变换原理可以计算二维像素平面视差d的像素点p(x,y),并将其投影得到三维世界坐标系下的换算关系,如公式(13)所示。
式中:B为双目基线的具体长度;
f为摄像机的焦距;
Rz(θ)为旋转矩阵;
cx、cy为相机内的参数;
[0,0,h]为平移矩阵;
xw、yw和zw为双目测量系统在三维坐标系中的x、y和z值。
由映射关系计算公式可以将图像坐标系下的像素点投影到三维世界的坐标系中,从而完成三维点的云重建任务。待完成视差计算和三维云重建后,再对车辆识别的定位结果进行计算,并采用计算所得距离的中位值作为智能车辆和前方车辆间的距离。
综上所述,随着人工智能、信息化技术以及互联网技术的快速发展,汽车工业的发展已经步入智能化时代,而机器视觉作为一种在车载智能化驾驶系统中应用广泛的技术,它的发展水平对汽车智能化驾驶系统有十分重要的影响。该文所设计的基于视觉导航车载智能驾驶系统是一种智能化的驾驶辅助系统,能够对车道偏离和车辆碰撞进行精准识别和预警,从而提高车辆驾驶过程中的安全性。未来,随着各种先进传感器和图像处理算法在智能驾驶系统中的应用,基于视觉导航的车载智能驾驶系统会有更高的精准性和实用性。
猜你喜欢 视差车道车载 一种车载可折叠宿营住房汽车实用技术(2022年10期)2022-06-09基于OpenCV的直道车道线识别技术研究汽车实用技术(2022年5期)2022-04-02基于自适应窗的立体相机视差图优化方法研究小型微型计算机系统(2022年1期)2022-01-21北斗+手机实现车道级导航应用卫星应用(2021年11期)2022-01-19避免跟车闯红灯的地面车道线科学大众(2021年9期)2021-07-16视差边缘优化的SGM 密集深度估计算法∗计算机与数字工程(2020年11期)2020-12-23Kobe—one of the greatest basketball players疯狂英语·新悦读(2020年6期)2020-06-28奔驰S级48V车载电气系统(下)汽车维修与保养(2019年3期)2019-06-19车载冷发射系统多刚体动力学快速仿真研究北京航空航天大学学报(2017年1期)2017-11-24斑马线前该如何礼让汽车与安全(2017年7期)2017-09-12







