漂浮式风力机平台局部系泊蠕变模式下动态响应分析
时间:2022-12-10 16:40:02 来源:雅意学习网 本文已影响 人 
孙 康, 金江涛, 李 春,2, 李蜀军, 许子非, 肖俊青
(1.上海理工大学 能源与动力工程学院,上海 200093;
2.上海市动力工程多相流动与传热重点实验室,上海 200093)
随着人类工业文明迅速发展,能源储量骤减、环境污染等问题凸显,因此推进能源转型、寻找绿色可再生能源已引起世界各国广泛关注[1]。
风能作为人类最早开发利用的可再生能源,具有储量丰富、分布广泛、绿色清洁和开采便利等优点,已成为最具发展前景的可再生能源之一。且随着风能研究的不断深入,海上风能因距经济发展中心近以及输送损耗低等优点而发展迅速。国家“十四五”规划纲要[2]明确提出“建设清洁低碳能源体系”、“大力提升风电”和“有序发展海上风电”等要求。但随着近海活动向深水域发展,桩柱式海上风力机已难以满足要求,需研发更合适的离岸支撑结构。其中,漂浮式风力机因其适用于深水深、广海域且施工安装灵活等优势而逐渐被风能领域接受并得到大量工程部署[3]。
作为深海风能的主要开发设备,漂浮式风力机因其重心高和无固定基础,在工作过程中受到风、浪、海流、风力机空气动力载荷以及风倾力矩等作用,系统各组成部分间耦合效应明显[4]。为确保风力机不发生位移与倾倒,通过系泊连接海底锚点为其提供定位与回复力。但因平台浮动特性造成的摇荡运动使系泊受到较大的时变拉力,同时因海水长期腐蚀与磨损等,影响整个漂浮式风力机系统安全运行,甚至导致平台损毁、人员伤亡和环境污染等特大灾难性事故发生[5]。2005年,飓风Rita造成服役于墨西哥湾的张力腿平台Typhoon TLP发生筋腱失效事故,最终导致发生倾覆事故[6]。当系泊失效后,漂浮式风力机动力响应增大,威胁其安全运行。
近年来,漂浮式风力机系统存在各种失效风险,平台动态响应方面的研究逐渐兴起。Li等[7]基于OC3-HywindSpar型浮式风力机,研究其在额定海况下出现单根锚链失效后的动态响应,发现锚链失效的风力机会增加相邻风力机的碰撞风险。Bae等[8]分析OC4-DeepCwind半潜型浮式风力机发生单根锚链失效后的动态响应,结果表明锚链失效会造成平台出现远距离漂移运动,并对锚链张力与机舱偏航误差具有一定影响。Yang等[9]基于细长杆理论简化立管与系缆,建立深水浮式结构-系泊系统耦合分析方法,研究各组成部分间的耦合效应。但上述研究大多针对风力机锚链失效后的动态响应,有关漂浮式风力机系泊方面的研究很少。
目前,深度学习广泛应用于风力机叶片故障诊断。其中,卷积神经网络(Convolutional Neural Network, CNN)因其提取特征能力强与分类效率高等优点逐渐受到重视[10]。Kreutz等[11]通过CNN对风轮叶片上的图像进行识别,实现对叶片结冰情况的精准识别;
Cao等[12]采用CNN学习和提取叶片故障特征,准确检测出叶片气动与质量不平衡故障。郭迎福等[13]融合CNN与三维振动信号对叶片裂纹进行诊断,通过建立裂纹样本数据库,实现了高精度识别效果。
基于此,笔者以搭载美国国家可再生能源实验室(National Renewable Energy Laboratory, NREL)5 MW风力机的ITI Energy Barge平台的系泊系统为研究对象,采用CNN对不同系泊蠕变下的动态响应数据进行分析,充分利用深度学习模型对蠕变系泊的信息进行挖掘,提取纯净信号,并结合混沌理论分析其吸引子轨迹,揭示隐藏于随机现象中的真实规律[14]。
1.1 漂浮式风力机模型
以ITI Energy Barge平台NREL 5 MW漂浮式风力机为研究对象。整机系统如图1所示[15]。

图1 Barge平台漂浮式风力机平台
风力机及漂浮式平台主要参数见表1和表2。

表1 风力机主要参数
1.2 系泊系统
ITI Energy Barge平台通过4个角上导缆孔的8根系泊与海底锚点连接,平台俯视图如图2所示。系泊参数见表3[16]。

表2 ITI Energy Barge平台参数

图2 系泊示意图
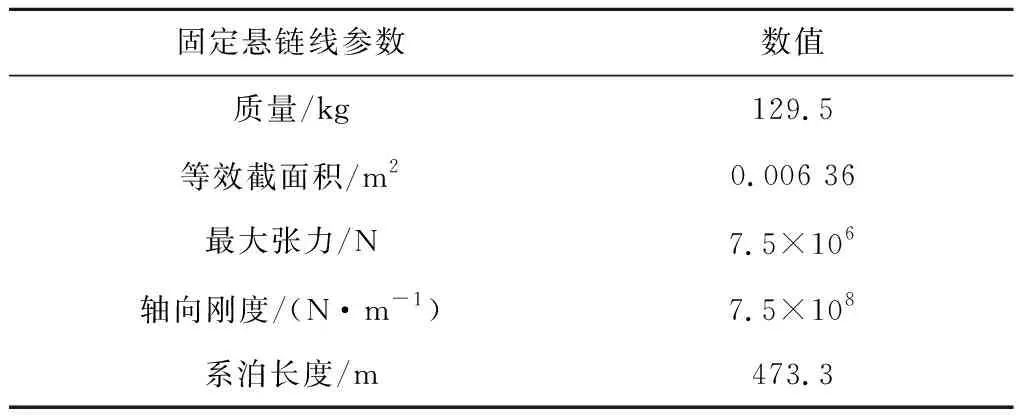
表3 系泊参数
现役漂浮式风力机在极端海洋环境中会受到风、浪及海流等多种载荷作用,其叶片受到的风载荷和漂浮式平台受到的波浪及海流载荷最为显著[17]。
2.1 风载荷
风力机上部叶片受到的载荷主要为风载荷,笔者基于叶素动量理论,采用动态入流理论(Dynamic Inflow Theory,DIT)求解叶片平面的诱导速度,计算沿叶片展向各位置的攻角大小[18]。其诱导速度为:
(1)

叶片受到的推力dQ和扭矩dN如式(2)所示:
(2)
式中:ρ为空气密度;
Ω为叶片转速;
b为切向诱导因子;
c为距轮毂中心r处风力机叶片弦长;
θ为来流攻角;
Cl为升力系数;
Cd为阻力系数;
a为轴向诱导因子;
U∞为来流速度。
2.2 波浪载荷
因Barge平台体积较大,其对波浪场的影响难以忽略,需考虑平台在水中的绕射效应,为此笔者基于辐射/绕射理论求解平台在水中的波浪载荷。其中速度势函数φ如式(3)所示[19]:
(3)
式中:φi为入射势;
φd为绕射势;
φr为辐射势;j为平台自由度个数。
上述函数需满足拉普拉斯方程及边界条件:
(4)
式中:g为重力加速度;
η为入射波波面函数;
t为延迟时间;n为浮体湿表面外法向量。
故Barge平台承受的波浪力FW和波浪力矩MW可记为:
FW=∬SB-pmdSB
(5)
MW=∬SB-p(r×m)dSB
(6)
式中:SB为浮体湿表面面积;
p为压强;
r为结构物表面到基点矢量;
m为结构物表面法线方向。
2.3 海流载荷
因海流速度较为缓慢,其对海工结构的作用力主要体现为拖曳力Fc,可记为[20]:
(7)
式中:ρs为海水密度;
Cd为阻力系数;
A为平台沿海流方向的等效面积;
Uo为流速。
2.4 环境参数
假设海流为均匀流,流速为0.8 m/s。依据IEC 61400-3海上风力机设计要求,基于Jonkman等[21]所提出的方法,采用Kaimal风谱,生成11.4 m/s的湍流风场,结果如图3所示。

图3 湍流风速谱
采用P-M谱生成波浪,谱峰周期为10.1 s,有义波高为6 m,不规则波高时历曲线如图4所示。

图4 波高时间序列
3.1 CNN原理
CNN作为典型的前馈神经网络,是一种端到端的数据处理方法,具有强大的特征提取能力,其本质是构造多个滤波器,逐层提取隐藏在原始数据中的特征信息,具有局部接受域、参数权值共享及稀疏式连接等特点,可有效避免数据冗杂与过拟合问题[22]。传统CNN模型主要包括卷积层、激活函数、池化层和全连接层。
3.1.1 卷积层
卷积运算作为CNN的核心,其通过矩形卷积核提取原数据,结合参数共享机制,将原始数据与卷积核进行卷积计算,输出特征数据[22]。其表达式为:
xi+1=Wi⊙xi+bi
(8)
式中:xi+1为卷积后的数据;
xi为卷积前的数据;
⊙为卷积运算符;
Wi为权重矩阵;
bi为偏置项。
3.1.2 激活函数
为对卷积后的数据进行非线性变换,采用激活函数进行预处理。常用的有Tanh、Sigmoid及Relu激活函数[23],笔者选用Relu函数,既避免了Sigmoid函数梯度消失问题,又提高了计算效率[22]。式(8)经变换得:
yi=f(xi+1)=f(Wi⊗xi+bi)
(9)
式中:yi为变换后的数据;
f(·)为Relu激活函数。
3.1.3 池化层
为解决卷积层特征提取后数据量及维度增加造成的维数灾难问题,在保证原特征信息不丢失的基础上,基于池化对前特征数据进行约简。笔者采用最大值池化,从池化核所对应的区域中选出最大值作为代表值,可反映原数据最显著的特征,其表达式为:
max-pooling(f[i-1],f[i],f[i+1])=
max(f[i-1],f[i],f[i+1])
(10)
式中:max-pooling为最大池化函数;
f[i]为第i个像素值;
max(·)为取最大值函数。
3.1.4 全连接层
全连接层为卷积池化与分类器的连接过渡部分,通过与卷积池化层的所有神经元连接,整合具有区分性的特征信息。经卷积池化后的特征信息输入全连接层,转化为一维特征向量,最后采用Softmax分类器进行分类[23]。
3.1.5 学习技巧
为防止CNN网络过拟合与提高诊断准确率,常采用一些学习技巧提高CNN性能。经长期实践总结,批量归一化(Batch Normalization, BN)、数据增强及Dropout技术等被广泛应用,笔者采用BN及Dropout技术处理原数据。其中,BN技术是指将原数据处理为同数量级的规范数据,防止梯度消失与梯度爆炸问题。Dropout技术会随机舍弃网络模型中一定比例的神经元,让极少部分异常数据进入模型学习,以减少其对模型的影响[24]。
3.2 CNN模型构架
针对本文所分析的系泊蠕变动态响应,设计如图5所示的CNN模型框架。模型参数见表4。
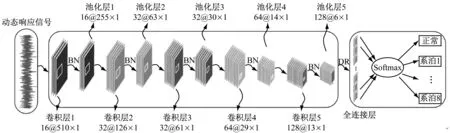
图5 CNN模型
分形理论作为现代非线性科学研究中十分重要的分支,表现为系统部分与整体之间存在自相似性,可定量描述非线性系统的分形特征。混沌作为时间尺度上的分形,具有敏感性、分维性、随机性及普适性等特点,可用于分析非线性动力学系统的不稳定发散过程[14]。
4.1 相空间重构
相空间重构是由Packard等[25]提出的一种通过重构吸引子轨迹还原系统非线性特征的方法。分析动态响应信号动力学特征时,将一维时间序列{yi|i=1,2,…,M}嵌入d维空间中得到相点X:
(11)
式中:N为第N个样本;
d为嵌入维数,d≥2r′+1;
r′为系统自变量个数。
嵌入维数d和延迟时间t对结果影响显著。d过小,吸引子无法充分展开,出现混叠现象;
d过大,计算效率降低并引入噪声,难以体现动力学特性。t过小,各坐标缺乏独立性;
t过大,不同时间下各坐标复杂度增加。
考虑到Cao方法[26]适用样本量少的信号和互信息函数法[27]可反映数据间的相关性,笔者基于Cao方法与互信息函数法计算嵌入维数d和延迟时间t,并将其作为构建混沌相图参数组合。
4.2 最大Lyapunov指数
混沌理论可体现动态系统中各成分间非线性相互作用,发现随机现象中的真实规律。为定量表示系统混沌特性,基于最大Lyapunov指数L[1]反映非线性响应信号特征信息,当L>0时,系统具有混沌特征,且与L呈正相关,反之系统无混沌特征。采用Wolf法[28]计算最大Lyapunov指数,其表达式为:
(12)

4.3 诊断流程
采用深度学习与混沌理论对各系泊蠕变阶段的平台艏摇响应数据进行分析,重点研究系泊是否发生蠕变及蠕变系泊位置。具体流程如图6所示。

图6 系泊诊断流程图
5.1 系泊蠕变下漂浮式风力机动态响应
漂浮式风力机安全稳定运行需系泊为其提供回复力,当系泊发生蠕变失效后,其长度和刚度发生小幅变化,该系泊为平台所提供的回复力发生改变,进而影响平台的动态响应。
考虑风、浪、流同向入射时平台响应最为强烈,系泊承受载荷最大,拉力波动最剧烈,其失效的可能更大[29],故设置风、浪、流均垂直于风力机平面入射。
因Barge平台8根系泊对称分布,对其中4根发生故障时的平台动态响应进行研究。风波作用下,分析系泊正常、蠕变与失效下六自由度上动态响应与1号、2号、3号和4号系泊在各阶段的最大响应幅值,结果见图7。
图7中,0~3 000 s、>3 000~6 000 s与>6 000~9 000 s分别为系泊正常、蠕变及失效时的漂浮式风力机平台动态响应。其中,柱状图分别代表不同系泊在3个阶段的最大响应幅值,分析各系泊在蠕变与失效阶段的动态响应可知:(1)垂荡及纵摇动态响应变化较小;
因系泊状态改变导致受力不均,平台受到的扭矩发生变化,横摇和艏摇响应急剧增大;
平台纵向与横向受力不均造成纵荡与横荡响应增大。(2)系泊失效后,平台响应幅值急剧增大,但在蠕变阶段,风力机平台在各自由度的动态响应变化极小。(3)不同位置的系泊状态变化对平台稳定性影响不同,远离迎风浪侧的3号、4号系泊影响较小,靠近迎风浪侧的1号、2号系泊影响较大。

(a) 纵荡
考虑系泊失效后平台动态响应急剧增大,风力机安全运行受到极大威胁。但在系泊蠕变阶段动态响应变化极小,不易发现,故在系泊蠕变阶段发现问题,对风力机平台动态响应数据进行分析和诊断,对提前预防系泊失效与保证风力机安全运行具有重要意义。
当系泊状态发生改变时,平台艏摇较其他自由度动态响应更为敏感,故对各系泊蠕变阶段的平台艏摇响应数据进行分析,其时域响应如图8所示。
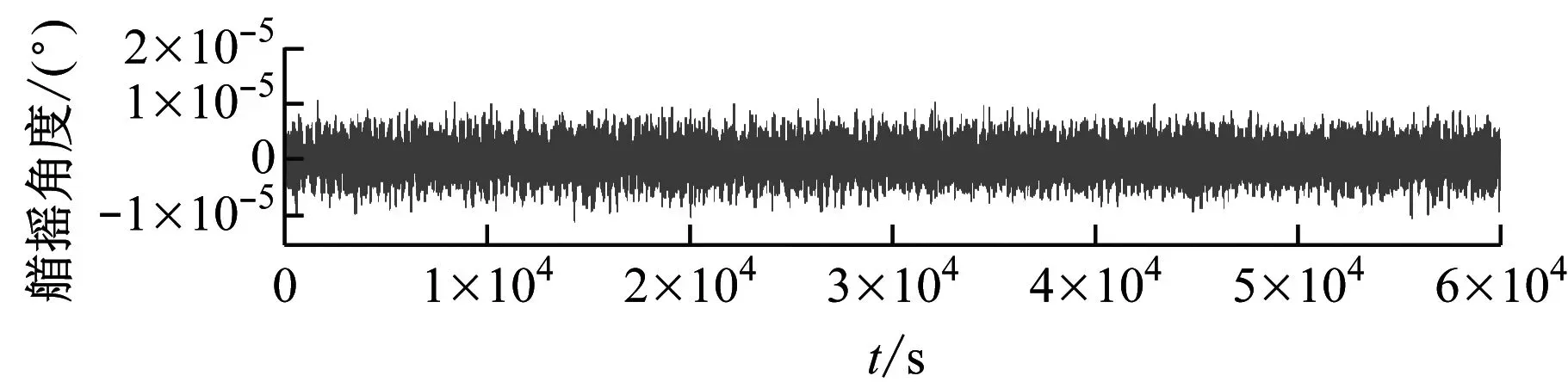
(a) 正常系泊
由图8可知,正常系泊与故障系泊时域图存在显著差异,可判断系泊是否发生蠕变,但无法准确识别蠕变系泊位置。为提取有效故障特征,基于相空间重构法绘制系泊蠕变三维吸引子轨迹,分析各系泊动力学系统混沌特性,采用Cao方法[26]与互信息函数法[27]计算最佳延迟时间t和嵌入维数d,结果见表5。

表5 最佳延迟时间与嵌入维数
各系泊状态吸引子轨迹如图9所示。分析图9可知,正常系泊与故障系泊相图存在显著差别,形态各异,但均呈冗杂毛球状,表现为非完全随机也非完全周期响应,表明各系泊动态响应信号具有显著的混沌特性。为定量表示,计算各系泊信号的Lyapunov指数,结果见表6。由表6可知,各系泊平台艏摇响应信号的Lyapunov指数均大于0,表明具有不同程度的混沌特性。

(a) 正常

表6 各系泊信号Lyapunov指数
5.2 CNN模型学习
为提取混沌序列中非线性特征信号并进行故障分类,将平台艏摇响应信号按8∶1∶1的比例分为训练集、验证集和测试集,输入CNN模型中训练,设置迭代140轮,每轮100次。蠕变系泊位置分类准确率及损失曲线如图10所示。由图10可知,CNN方法可较好地进行状态识别,迭代达到22轮时准确率与损失率均几乎不再改变,此时准确率高达98.86%,损失率为0.051 7,模型未发生过拟合现象,表明该方法可提取出纯净动态响应信号。
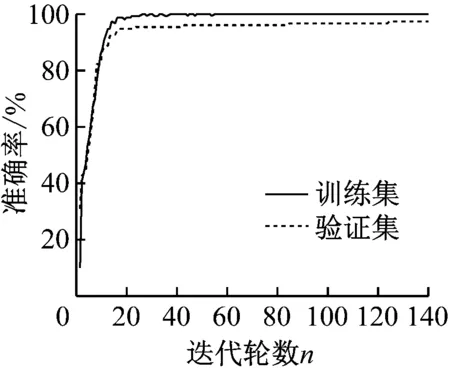
(a) 准确率
为更清晰地展示模型对蠕变系泊位置的分类效果,引入混淆矩阵进行识别,结果如图11所示。其中,横轴为预测类别,纵轴为实际类别,主对角线表示正确分类样本数。由图11可知,仅系泊4蠕变被误判为系泊5蠕变,其余蠕变系泊位置分类均无错误,总体分类准确率较高。

图11 故障诊断多分类混淆矩阵
5.3 模型可视化
为证明本文所提方法的特征提取及分类能力,采用t-SNE[30]对提取的特征信号进行降维,可视化故障特征,结果如图12所示。由图12可知,随卷积层数增加,对数据特征捕捉逐渐深入,各蠕变系泊类间距增大,在卷积层2中已出现点簇分离现象,其中正常系泊已明显分离;
在全连接层中,各蠕变系泊已可明显区分,表明CNN可从混沌序列中提取纯净非线性信息。
为进一步了解卷积层学习特征属性,可视化卷积层1与卷积层5所提取的特征信号,分析其混沌特性,图13和图14给出了吸引子轨迹。由图13和图14可知,各蠕变系泊吸引子轨迹具有显著混沌特征,随着卷积层数增加,吸引子由混沌无序朝有序性发展。为定量表示其混沌特性减弱、纯净性增强,计算各蠕变系泊原始数据与卷积层5的Lyapunov指数L,结果如图15所示。考虑L>0时,系统具有混沌特征,且其非线性随L增大而增强[28]。由图15可知,各状态系泊原始数据经相空间重构后计算得到的L大于在CNN模型卷积层5所提取数据计算得出的L,表明平台艏摇动态响应经CNN模型卷积池化等操作后非线性降低,即本文所提出的方法可提取较为纯净的非线性信息。



图15 原始数据与卷积层5的Lyapunov指数
(1) 系泊蠕变阶段,平台响应变化极小,但系泊失效后平台响应急剧增大,其中艏摇响应更为敏感。
(2) 经CNN处理后的系泊平台响应分类准确率高、损失率低,且收敛速度快。
(3) 采用t-SNE降维后,不同系泊蠕变的平台艏摇响应信号可明显区分。
(4) 结合吸引子轨迹与Lyapunov指数可反映信号混沌特性,其中Lyapunov能够定量表示CNN可从混沌序列中提取纯净非线性信息。
猜你喜欢 卷积动态特征 基于全卷积神经网络的猪背膘厚快速准确测定农业工程学报(2022年12期)2022-09-09国内动态卫星应用(2022年7期)2022-09-05国内动态卫星应用(2022年3期)2022-05-23离散型随机变量的分布列与数字特征中学生数理化(高中版.高考数学)(2022年3期)2022-04-26基于图像处理与卷积神经网络的零件识别计算技术与自动化(2022年1期)2022-04-15国内动态卫星应用(2022年1期)2022-03-09一种基于卷积神经网络的地磁基准图构建方法北京航空航天大学学报(2021年9期)2021-11-02基于3D-Winograd的快速卷积算法设计及FPGA实现北京航空航天大学学报(2021年9期)2021-11-02动态环球慈善(2019年6期)2019-09-25抓特征解方程组初中生世界·七年级(2019年5期)2019-06-22






