飞翼飞机嵌入式大气数据系统算法研究
时间:2022-12-07 09:15:04 来源:雅意学习网 本文已影响 人 
王 禹,郑 伟,童建忠,张 冬
(航空工业沈阳飞机设计研究所 飞行控制部,辽宁 沈阳 110035)
现代军用飞行器强调高机动性、高超声速、高隐身性能,通过突出蒙皮的探头或风标直接测量的传统大气数据系统在隐身性以及热防护方面难以满足新型作战飞行器平台的需求。为弥补传统大气数据系统的不足,美国国家航空航天局的Dryden研究中心于20世纪60年代在X-15项目中提出将传感器内嵌于机体来测量大气数据的思想,并研发了原理样机[1]。随后,兰利研究中心在解决航天飞机再入后大气数据测量问题时,提出在飞机头部布置大量压力传感器,通过测量压力来推算大气数据的技术,即嵌入式大气数据测量技术。经多年发展,目前该技术已应用于多个型号的飞行器及飞行试验中,例如美国的X-15、F-14、航天飞机、F-18、X-31、X-33、X-38、X-34、X-43A、X-47B、B2、日本HYFLEX、德国SHEFEX Ⅱ[2]以及欧洲“神经元”等。
嵌入式大气数据传感(Flush Air Data Sensing,FADS)系统是利用飞行状态与飞行器表面压力分布之间的映射关系进行大气数据的测量。通过安装在飞机头部或两侧机翼或机身上的嵌入式压力传感器阵列来感受飞行器表面压力,由FADS算法解耦计算动压、静压、迎角、侧滑角等大气参数,间接实现各飞行参数的测量。由于所有压力传感器均内嵌于飞行器表面,无任何突出物,因此FADS系统具备两项基于探头式的传统大气数据系统无法比拟的突出优势:既满足飞行器高隐身要求又可以适应高超声速恶劣的飞行环境[3]。可以说FADS系统是未来高隐身、高超声速飞行器的必然选择,并将在未来各类新型飞行器中得到应用[4]。
对于FADS系统,其涉及的关键技术主要包括气动建模和算法建模两个部分。气动建模是指完成嵌入式测压点选位布局、构建流场样本数据集等,准确可靠的气动模型为算法建模提供设计依据。算法模型是整个FADS系统的核心和难点,FADS系统设计工作主要围绕算法模型展开。由于FADS算法需要通过压力分布得到静压(Ps)、总压(Pt)、迎角(α)、侧滑角(β)和马赫数(Ma)共5个大气参数,且各参数间是强耦合的,因此算法模型十分复杂。目前,国内外关于FADS算法研究的文献均以类球头的气动外形为研究对象;
FADS系统虽已应用于B-2、X-47B和“神经元”无人机等飞翼布局飞机,但关于其大气数据系统的技术细节讨论很少,更没有关于其算法的技术资料或文献。
本文从类球头集中式、飞翼飞机分布式两大类FADS系统和算法的研究与应用情况出发,对比两类系统在测压点选位布局、气动特性、算法等方面差异。两类系统差异较大,飞翼飞机的气动特性更为复杂,不能简单套用类球头集中式的FADS算法。为此,提出一种面向飞翼布局飞机的基于最小二乘法的FADS算法模型,并开展了仿真验证和分析。
FADS系统的应用可以划分为两大类:一类是将测压点集中布置于机头锥的类球头上的FADS系统;
另一类是将测压点分布在机头和机翼上的分布式FADS系统,用于飞翼布局飞机。两类FADS系统从应用范围、测压孔选位布局到算法模型均有较大差异,下面将分别进行讨论。
1.1 类球头集中式FADS系统
类球头集中式FADS系统应用较为广泛,均将测压孔集中布置在机头锥上。其测压孔分布大多采用十字型开孔布局,例如X-33[5]、X-34[6]、X-43A[7]、航天飞机[8]等,也有特殊机动需求的飞行器采用放射性(如F-18[9])或扇形(如X-31[10])的开孔布局,典型类球头集中式FADS系统测压点选位布局示意图如图1~图3所示。

图1 X-33测压点十字开孔选位布局示意图

图2 F-18测压点放射性选位布局示意图

图3 X-31测压点扇形选位布局示意图
有大量公开文献研究类球头集中式FADS系统算法模型,其相关研究和应用较为成熟。该算法可分为三类:经典三点法[10-11]、最小二乘法[12]和人工神经网络法[13-15],由于相关文献较多,本文不展开讨论,仅简要对比上述3种算法的特点。
经典三点法是基于半经验空气动力学模型的算法,不需要迭代计算,仅适用于气动模型简单的类球头外形;
最小二乘法是基于流场样本数据集的拟合迭代算法,原理清晰,但计算量较大;
人工神经网络法将未知系统看成一个黑盒,建立神经网络模拟从测压点到大气参数的复杂非线性映射关系,无须迭代计算。
1.2 飞翼飞机分布式FADS系统
飞翼飞机分布式FADS系统目前在美国B-2、X-47B,欧洲“神经元”无人机上得到应用。其测压点数量一般为5~7个,分布在机头锥上、下表面以及机翼上、下表面。飞翼飞机分布式FADS系统测压点选位布局示意图如图4~图6所示。

图4 B-2飞机FADS系统测压点选位示意图

图5 X-47B飞机FADS系统测压点选位示意图

图6 “神经元”无人机FADS系统测压点选位示意图
目前为止,公开文献上没有关于飞翼飞机分布式FADS算法模型的相关研究内容。但根据对类球头集中式FADS系统3种算法的推演,可以初步得出以下结论。
① 由于飞翼飞机气动模型远比类球头外形的气动模型复杂,因此基于气动模型半经验公式的经典三点法不适用于飞翼布局飞机。
② 最小二乘法从原理上可以实现大气参数的解耦计算,第2节将详细说明本文提出的一种基于最小二乘法的飞翼飞机FADS算法。
③ 人工神经网络法从方法原理上讲,也可以实现大气参数的解耦计算。但由于该算法将未知系统视为黑盒,其算法物理原理解释性差,存在一定不确定性。因此在工程领域,尤其在飞行控制这种安全关键系统中,需对算法模型的测试性、验证性、鲁棒性等开展大量研究工作。本文未对该方法展开详细讨论。
2.1 气动外形及测压点选位布局
本文研究对象是一个背部进气飞翼布局飞机(类似X-47B气动外形[16-18]),共布置5个测压点[19-20],分别布置在机头锥下表面(P5)、右侧机翼上、下表面(P2、P1)、左侧机翼上、下表面(P4、P3),如图7所示。

图7 飞翼布局及测压点位置(编号)示意图
以图7中飞机气动外形和测压点选位为研究对象,通过CFD(Computational Fluid Dynamics,计算流体力学)计算建立流场样本数据集,获得不同Ma、α、β条件下,各测压点处的压力系数值Cp。典型飞行状态的气动特性规律如图8~图10所示。
根据图8~图10所示的气动规律,飞翼飞机机翼下表面两个测压点的压力系数差Cp1-Cp3和上表面两个测压点的压力系数差Cp2-Cp4随侧滑角变化单调线性,右侧机翼上、下两个测压点的压力系数差Cp1-Cp2随迎角变化单调线性。单调线性压力系数差是支撑2.2节中算法稳定收敛的基础和前提。

图8 右-左压力系数差Cp1-Cp3随侧滑角变化

图9 右-左压力系数差Cp2-Cp4随侧滑角变化

图10 下-上压力系数差Cp1-Cp2随迎角变化
综上,在进行测压点选位设计时,应该针对不同气动外形飞机开展风洞试验或CFD计算,再依据气动特性详细分析不同位置测压点处的局部流场特性,测压点选位布局不具备通用性。随迎角、侧滑角线性变化的斜率越大、线性度越高,算法对传感器测量误差的容限越大,解算的鲁棒性越高,越有利于后端算法解算。
2.2 基于最小二乘法的FADS算法模型
FADS算法以分布于飞机表面的5个测压点局部压力值为输入,经解耦计算输出Pt、Ps、Ma、α、β共5个大气参数。
各测压点处局部压力可以表示为
Pi=Ps+Cpi(Ma,α,β)·qc
式中:Cpi(Ma,α,β)为各测压点处的压力系数值,该值由风洞试验数据标定,且Cp值为Ma,α,β三个变量的函数。
下面以一个计算周期为例,给出算法解算过程描述。
选取3个测压点(i,j,k)处的实测压力值Pi、Pj、Pk,作差并求比值可得:
当3个测压点选定时,K为定值,则有:
Cpi-Cpj=K·(Cpk-Cpi)
给定Ma,β初值,Cpi-Cpj和Cpk-Cpi随迎角的变化情况可以采用最小二乘法近似拟合为两条直线,两条直线的斜率和截距分别为K1、bα1以及K2、bα2。上式可以表示为
K1·α+bα1=K·(K2·α+bα2)
式中:仅α一个未知变量,可由此求解α。
而后,选取2个测压点(m,n),联立2个测压点局部压力表达式:
易得动、静压表达式:
式中:Cpm、Cpm-Cpn由前面求解的α代入最小二乘法拟合的直线得到。
易得总压:
Pt=qc+Ps
根据标准大气方程,可得Ma:
式中:k=1.4(亚音速时)。由上式可求解得Ma。
至此,解算得到当前拍的α、Pt、Ps、Ma的值。当Ma、α确定时,可以采用最小二乘法拟合压力系数差随β变化的直线,并求得β(与求解α方法一致)。
此后开始进行迭代计算,根据当前拍求解的Ma、β代替初值,求解下一拍的α,以此类推。当连续两拍解算值满足迭代收敛条件时,停止迭代。迭代流程图如图11所示。

图11 迭代计算流程图
需要注意的是,解算过程中选取测压点时,应结合测压点处局部流场的气动特性规律,测压点选位及其气动规律特性将对解算结果精度和迭代次数有一定影响。例如,在求解α时,选取同侧上、下表面的压力系数差(Cp1、Cp2或Cp3、Cp4)进行最小二乘法拟合,压力系数差随迎角变化越敏感、且线性度越好,越有利于完成迭代解算。
所采取的验证方法如图12所示,根据仿真数据中的Pt0、Ps0、Ma0、α0、β0以及气压高度Hp,结合流场样本数据集,通过逆向算法还原出各测压点的压力。再将测压点压力输入FADS算法,得到大气参数计算值Pt1、Ps1、Ma1、α1、β1。通过比较大气参数计算值与真值验证FADS算法正确性及精度。其中逆向算法是由Ma、α、β对流场样本数据集进行查表、插值计算,得到各测压点处的压力系数,然后根据HB6127的标准大气方程计算得到各测压点处的压力。

图12 验证方法
上述验证方法用于验证FADS算法的解算精度,即数学模型引入的误差,而不是工程应用中FADS系统误差。系统误差除包括数学模型解算误差外,还应包括传感器信息采集误差、流场样本数据集与真实流场偏差等。其余部分误差只能通过物理仿真试验或飞行试验进行评估,不在本文讨论范围内。
截取一段某飞机的飞行仿真数据,该段数据共3000个飞行状态,Ma数变化范围是(0.4,0.82),α变化范围是(-2°,10°),β变化范围是(-5°,6°),涵盖了常用飞行包线范围。
仿真结果如图13~图18所示,图中分别将各大气参数的真值和计算值进行对比,并做了差值,图中横坐标对应仿真数据中的每个状态点。

图13 马赫数解算结果

图14 迎角解算结果
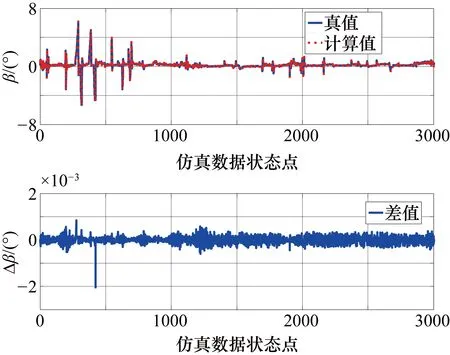
图15 侧滑角解算结果

图16 总压解算结果
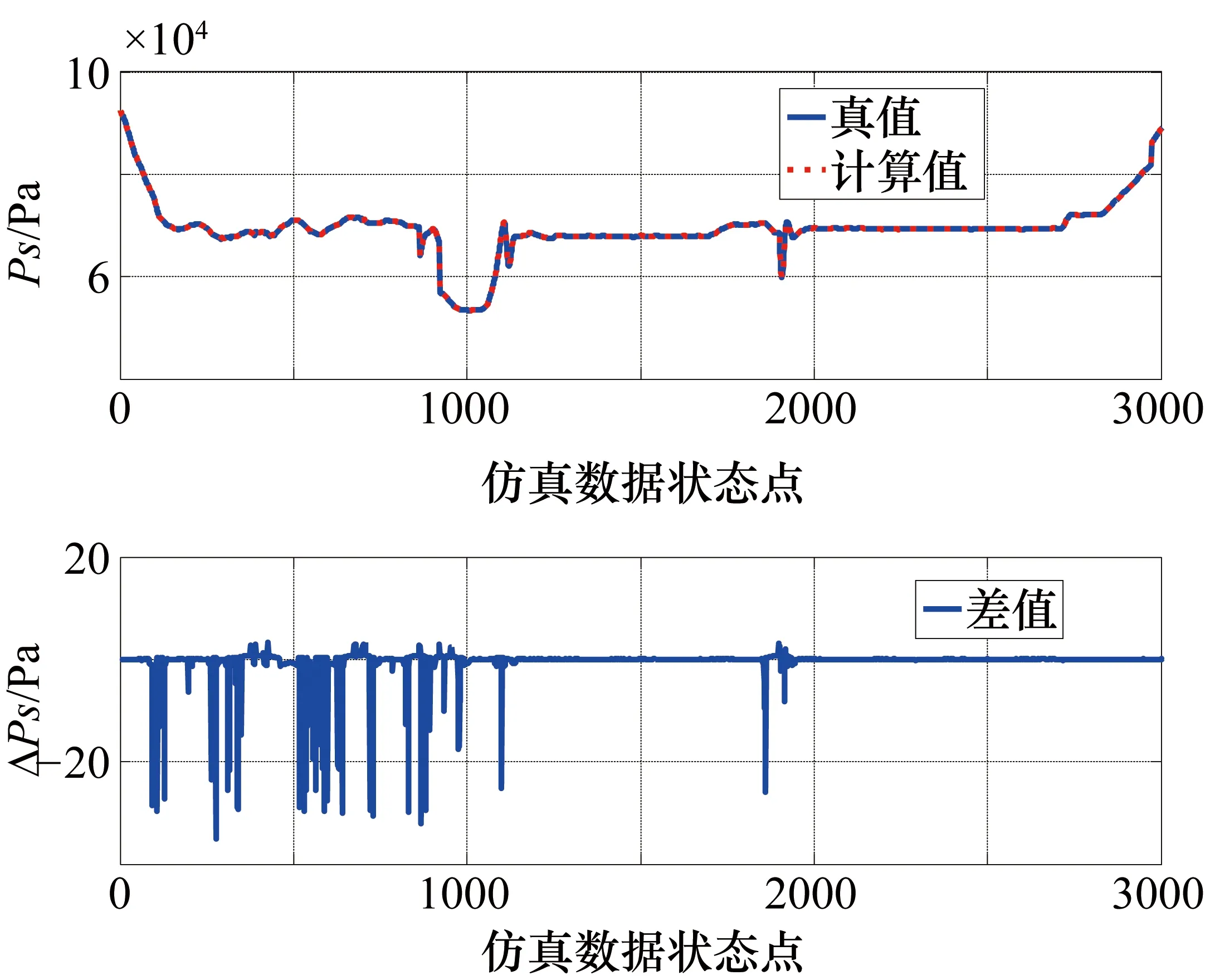
图17 静压解算结果

图18 解算迭代循环次数
由图13~图18可得,对于仿真的各状态点,Ma解算误差小于0.001,α解算误差小于0.02°,β解算误差小于0.002°,Pt、Ps误差均小于40 Pa。图15为仿真每个状态点是迭代计算的循环次数,可见迭代4~7次各参数可以收敛到较高精度。仿真结果表明:本文基于最小二乘法的FADS算法解算精度较高,且迭代计算稳定收敛,能够满足飞翼布局飞机FADS系统解算要求。
FADS系统凭借其对高超声速环境及高隐身需求的适应性,必将得到更深入的研究发展和更广泛的应用。针对高隐身飞翼布局飞机大气数据测量问题,本文选取类X-47B飞机气动外形,采用全嵌入式的飞翼飞机分布式测压点选位布局,开展了FADS算法模型研究,提出一种面向飞翼布局飞机基于最小二乘法的FADS算法模型。经仿真验证:算法解算精度较高,迭代计算稳定收敛。研究成果可为工业部门开展飞翼飞机嵌入式大气数据系统设计及算法建模提供参考。
猜你喜欢 飞翼气动大气 揉以成器,大气悠远走向世界(2022年18期)2022-05-17一种连翼飞行器气动和飞行力学迭代仿真方法北京航空航天大学学报(2021年4期)2021-11-24无人直升机系留气动载荷CFD计算分析北京航空航天大学学报(2021年9期)2021-11-02宏伟大气,气势与细腻兼备 Vivid Audio Giya G3 S2家庭影院技术(2021年8期)2021-11-02连续变弯度翼型动态气动特性数值模拟北京航空航天大学学报(2021年6期)2021-07-20基于NACA0030的波纹状翼型气动特性探索北京航空航天大学学报(2021年6期)2021-07-20空军招飞宣传片透露哪些重磅信息环球时报(2021-01-07)2021-01-07大气光学现象百科探秘·航空航天(2020年8期)2020-07-29支撑刚度对飞翼模型固有模态和体自由度颤振特性的影响振动工程学报(2018年5期)2018-01-04无尾鸭式布局无人机稳定特性研究科技创新与应用(2017年18期)2017-06-27








