斜视及近视伴有斜视用户眼动数据校正
时间:2023-06-15 21:20:02 来源:雅意学习网 本文已影响 人 
栗战恒
(1.河南科技大学 应用工程学院,河南 三门峡 472000;
2.三门峡职业技术学院 机电工程学院,河南 三门峡 472000)
视线跟踪算法的研究,主要是通过提取的眼睛特征(如瞳孔中心、角膜曲率中心等),建立人眼特征和用户视线的映射关系。过去二十年见证了视线跟踪技术的飞速发展,但眼动数据的跟踪精度仍然存在一些缺陷。大多数基于模型的视线估计方法所建立的映射关系需要一些先验参数,这些参数在实践中往往被设置成常数[1]。然而,最近的研究表明眼球具有种族特征和个体差异[2],使用恒定参数忽略个体差异进行视线估计将导致偏差。近视是一种全球性的眼病,随着近视屈光度数的增加,眼球轴向长度有所增长[3]。斜视是另一种常见的眼病,指眼球光轴与视轴发生明显偏离的现象,高度近视容易引起固定性斜视[4],进而产生近视伴有斜视的情形。以上眼部疾病引起的眼球变化最终导致使用通用眼球模型时的眼动数据误差。对眼病用户的眼动数据校正可以拓宽原眼动设备的应用场景,降低用户使用成本。因此,对于眼病用户的眼动数据校正是必要的。
近年来国内外一些学者开始致力于眼动数据校正方面的研究。例如,一种名为Surface Recalibration的视线校正方法被提出并用于提升人机交互的性能[5];
SPOCK目标投影被提议用于用户交互的在线重校准;
VADILLO[6]等使用最佳拟合线性变换用于视线跟踪实验中注视数据的离线校正;
一种基于回归的视差模式校正方法被应用于视觉搜索任务[7];
ZHU[8]等基于用户头部和平面参数的几何关系提出了一种头部运动的补偿方法;
另有学者在欧几里德几何基础上提出了补偿眼动数据误差的黎曼空间算法[9]。上面提及的研究方法多基于误差数据本身进行数据拟合,未从产生误差的眼球本身进行分析。为此,针对眼部疾病引起的眼动跟踪数据不准问题[10-13],提出一种基于眼球模型的眼动数据校正算法,结合眼动仪使用过程中的视线标定,通过计算用户眼动数据与眼动估计数据之间几何关系求得用户眼球系统偏差,并使用计算机仿真验证该算法的有效性。
为了简化计算,一般可将眼球视为围绕一固定点旋转的球体,如图1所示,眼球中心位于角膜后13.5 mm处,瞳孔中心位于球面之上[14-15]。眼动仪在使用前需要进行视线标定用于匹配眼动视角与屏幕坐标之间的关系[16]。眼动数据校正流程可简要概括为3部分。一是,根据视线标定中用户视线点与对应的视线估计点之间关系得到用户眼球模型偏差;
二是,根据眼球模型偏差计算眼动数据偏差;
三是,校正眼动数据。
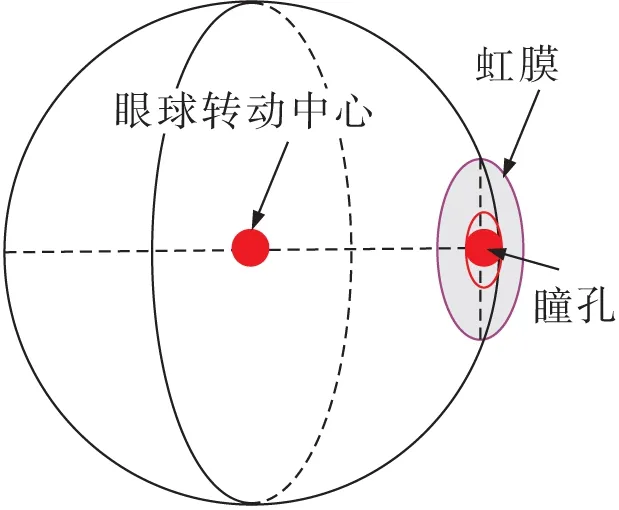
图1 球体模型
眼动仪使用过程中,眼睛与屏幕位置关系如图2所示。O为眼球中心,Z为眼动仪,A为用户正视前方时视线与屏幕的交点,Z位置不变,A点坐标、OZ及OA长度可由眼动仪采集获得,可视为已知量。

图2 眼睛与屏幕位置示意
近视用户的眼动数据校正已在文献[17]中进行了说明,接下来将以斜视与近视伴有斜视为例进行眼动数据校正的说明。
1.1 斜视用户眼动数据校正模型
斜视分为水平斜视、垂直斜视和旋转斜视,水平斜视及垂直斜视是旋转斜视的特例。同一用户,眼球视轴和光轴的偏离方向及偏离角度不变,以旋转斜视进行说明,选取单只眼球为例进行分析,双眼的眼动数据校正与此类似。
图3(a)为用户眼球局部放大图,图3(b)为对应的用户视线示意图。O为眼球中心,平面ACDB为屏幕平面,直线AB、CD、C1D1位于水平方向,直线AC、BD、B1D1位于垂直方向,OA垂直于平面ACDB。图(a)中,用户由A看向D时眼球转动∠AOD,等于眼球水平方向转动∠AOB与垂直方向转动∠AOC的叠加;
图(b)中,D为用户观察点,D1为相应的视线估计点,用户视线偏离角度∠D1OD可分为水平偏角∠B1OB(α′)与垂直偏角∠C1OC(β′)的叠加。
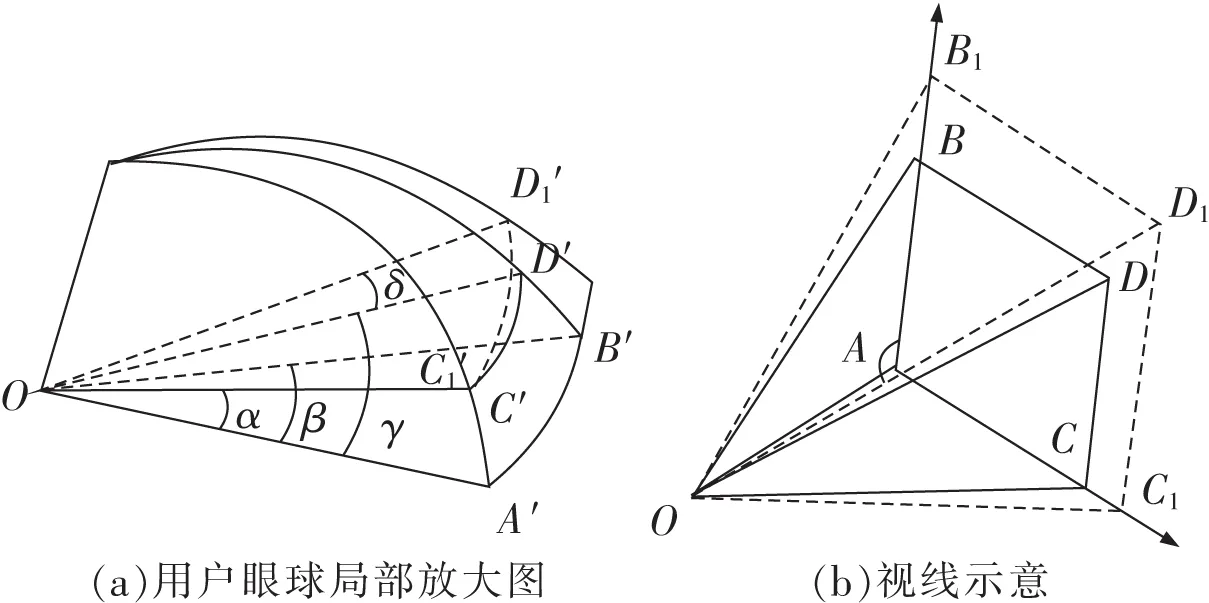
图3 斜视时眼睛注视目标示意
如图4所示,在水平切面上斜视偏角α′和正常注视偏角α由于观察目标位置不同存在4种几何关系。如图4(a)所示,α与α′转向一致时,由几何关系可得
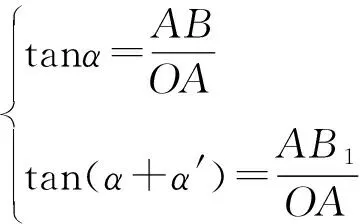
(1)

图4 斜视用户过眼球中心O的水平切面示意
视线标定时,A、B、B1坐标及OA距离均已知,由
(2)
可解得tanα′。视线标定完成后(重画图4(a),为方便说明,用户目标位置仍记作B,其他标注类似)上面式子仍然满足,此时α为待求值,记做αx,有
(3)
(4)
若记点A、B、B1坐标分别为(xA,yA)、(xB,yB)、(xB1,yB1),此时,点A、B1坐标及OA长度已知,其中xD=xB,有
(5)
图4(b)、(c)、(d)推导过程与图4(a)类似。可以发现,水平切面正常注视偏角α与偏离角α′转向不一致(如图3(b)、(c)、(d))时,校正公式相同,均满足
(6)
将视线标定时任意参考点与相应视线估计点的水平坐标差值记为m,对于同一受试者,m值正负性不变。当满足式(7)时
(7)
水平方向正常注视偏角α与偏离角α′转向一致,选取公式(5)进行校正,否则选取公式(6)进行校正。
垂直切面上斜视偏角β′和正常注视偏角β由于观察目标位置不同存在与水平切面相似的几何关系,其推导过程类似。将视线标定时任意参考点与对应视线估计点的垂直坐标差值记为m1,当满足式(8)时
(8)
选取公式
(9)
进行校正,否则选取公式
(10)
进行校正。
1.2 近视伴有斜视用户数据校正模型
近视,尤其高度近视可能伴随一定程度的斜视。图5为近视伴斜视用户观察目标时过眼球中心O的水平切面图,偏离角γ和正常注视偏角α由于观察目标位置不同存在6种几何关系。如图5(a)所示,当α与γ转向一致时,由几何关系可得
(11)
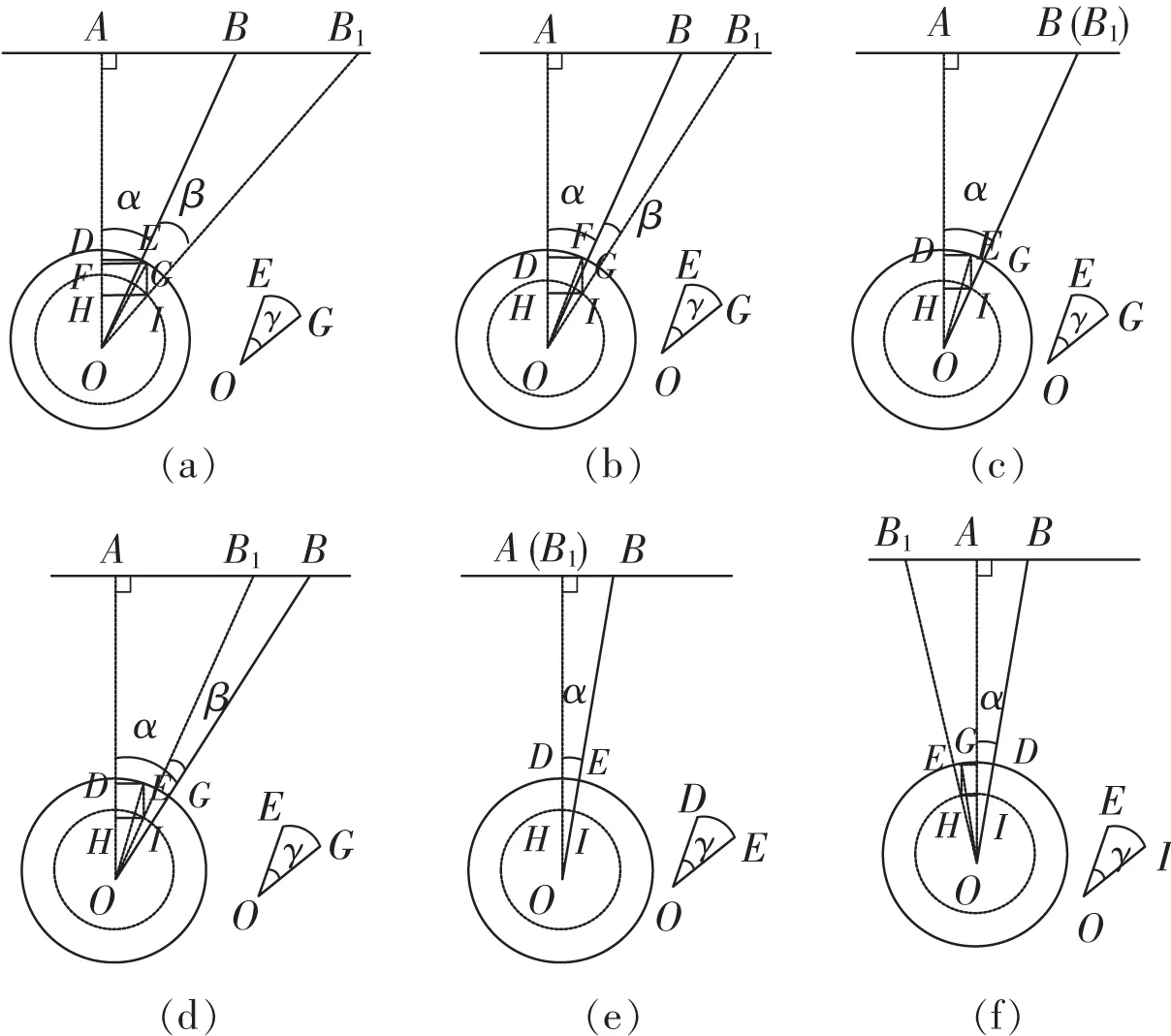
图5 近视伴随斜视用户过眼球中心O的水平切面示意
其中,OE=OG,FG=HI,记OI=r,OG=OE=R,有
(12)
当另一参考点满足类似几何关系式时(重画图5(a),该参考点仍记作B′,其他标注类似),同理有
(13)
视线标定时,A、B、B1、B′、B1′坐标及OA长度均已知,同一用户γ及r/R值不变,联立以上方程可解得r/R与γ。
视线标定后(重画图5(a),为方便说明,用户目标位置仍记作B,其他标注类似)上面式子仍然满足,此时A、B1坐标及OA长度已知,α为待求值,记做αx,有
(14)
AB=OAtanαx
(15)
记A、B、B1坐标分别为(xA,yA)、(xB,yB)、(xB1,yB1),其中xD=XB,有
(16)
图5(b)、(c)、(d)、(e)、(f)的推导过程与图5(a)类似,可以验证当水平切面正常注视偏角α′与γ转向不一致如图3(b)、(c)、(d)、(e)、(f)时校正公式相同均满足公式(20)。
(17)
将校正前视线标定时任意参考点与对应的视线估计点水平坐标差值记为m,对于同一受试者m值正负性一致。当满足式(18)时
(18)
选取公式(16)进行校正,否则选取公式(17)。
垂直切面上存在与水平切面相似的几何关系,其数据推导过程类似。将校正前视线标定时任意参考点与视线估计点的垂直坐标差值记为m1,对于同一受试者m1值正负性一致。当满足
(19)
选取公式(20)进行校正,否则选取公式(21)进行校正。
(20)
(21)
采用计算机仿真的形式对上述校正算法进行验证,仿真时眼动仪的跟踪距离选为65 cm,并假定用户正视点(上文点A)位于屏幕中心,在23.1英寸显示器上进行。
以近视伴有斜视为例进行计算机仿真实验。成年人正常眼球长度为23 mm左右,经典理论认为眼轴每延长1 mm,屈光力可增加约3D[18],根据临床经验,仿真时R/r取值为1.0~1.2,斜视角度为0°~20°[19]。用户眼球的生理震颤和外界干扰会对眼动数据造成影响,因此采用实验拟合扰动误差模型,之后将其施加于计算机仿真来模拟实际情形。扰动模型符合水平方向N(0,0.202 5)、垂直方向N(0,0.240 1)的正态分布,单位为度。将计算机屏幕等分成9部分,以每部分中心作为参考点,从上到下、从左到右依次编号为1、2、3、…、9。
水平右斜视为5°,R/r为1.1,校正前后的视线误差及视线估计点对比图分别如图6和7所示,测试点1~9表示屏幕上9个参考点。视线跟踪误差定义为参考点与对应的视线估计点距离Δd的均值,单位为像素(pixel)。Δd越大,视线估计点和实际视线点之间的距离越远,数据误差越大。
由图7可见,校正前眼动数据偏差与用户观察位置有关,用户注视某些位置时的数据偏差可能由于近视、斜视以及观察位置的不同而产生抵消(第4参考点)或增大(第3参考点),且呈现非线性,这与用户做人机交互实验时观察到的现象一致。数据校正后,视线落点均匀分布在真实值周围且数据偏差小于校正前。

图7 近视伴有斜视时校正前后视线估计点对比
可以验证,在R/r的取值为1.0~1.2,斜视度数为0°~20°,校正后眼动数据偏差稳定在±24 pixels(0.56°)范围内,比校正前降低了73.10%,校正后数据可以满足正常的人机交互应用。
将所提出的基于眼球误差的校正算法与ZHANG和HORNOF[20]的线性回归算法进行了对比分析,其结果对比如图8所示。由图可知,本文算法与Zhang的线性回归算法均可以很好地校正眼动数据偏差,本文算法在用户正视点与观察对象距离较大时具有微弱优势。线性回归算法完成数据校正至少需要6个标定点,而本文算法仅需2个,可以节省计算资源,提高了校正效率。
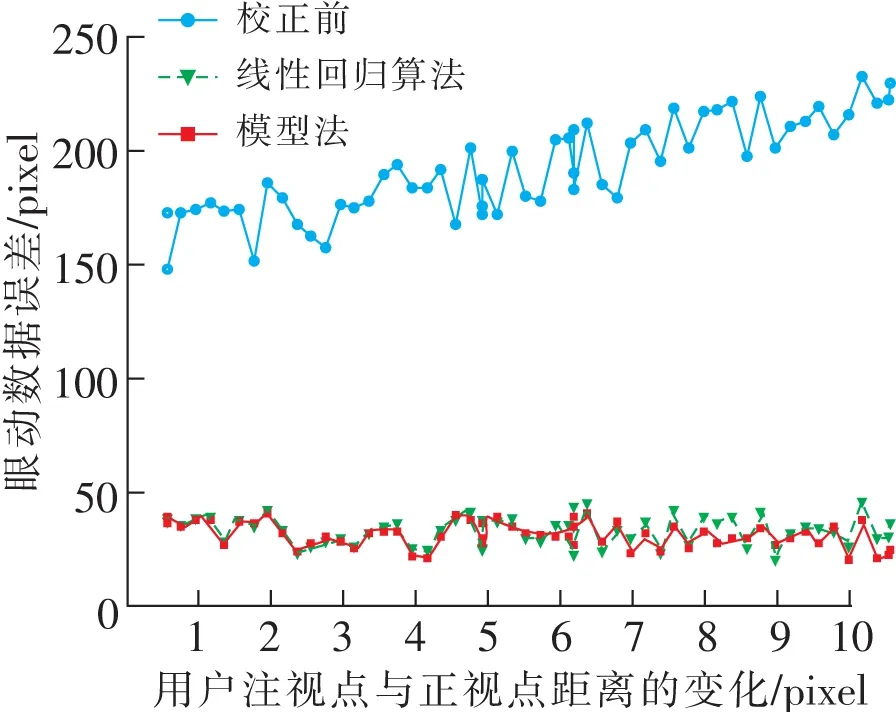
图8 算法校正结果对比
本文算法从产生眼动数据误差的眼球进行分析,建立了斜视、近视伴有斜视用户的眼球误差模型,进而得到用户真实视线数据与视线估计数据之间的映射关系,可以使原眼动设备在不更改硬件的情况下直接应用于斜视及近视伴有斜视用户。该算法拓宽了原眼动设备的应用场景,降低了用户使用成本,对视线跟踪技术的发展起到一定的促进作用,有望成为一种校正眼疾病人群眼动数据的简单方法,并对其他眼病用户的数据校正具有一定的启示作用。
对斜视、近视伴有斜视等眼病导致的视线跟踪不准问题提出了相应解决方案,通过整合几种条件下的几何解用于眼动数据校正,有效降低了眼部疾病引起的眼动数据偏差。实验结果表明,提出的方法是有效的,校正后的数据偏差减少了73.10%。该算法可以校正眼病导致的依据固定眼球模型得到的眼动数据,并可以修正基于模型的视线估计算法的建模误差,但是存在一定的局限性。本文提出的理论为简化计算采用了SHAO G[14]等的球体模型,这与实际眼球模型之间存在一些差异,对于如何建立自适应的眼球模型,提高视线估计精度,将在接下来进行进一步的研究。
猜你喜欢 参考点眼动斜视 基于眼动的驾驶员危险认知汽车实用技术(2022年7期)2022-04-20基于ssVEP与眼动追踪的混合型并行脑机接口研究载人航天(2021年5期)2021-11-20FANUC 0i-MF数控系统参考点建立与调整湖北农机化(2020年22期)2021-01-18基于眼动信号的便携式无线智能交互系统设计中国生物医学工程学报(2019年5期)2019-07-16数控机床返回参考点故障维修精密制造与自动化(2018年1期)2018-04-12基于参考点预测的动态多目标优化算法自动化学报(2017年2期)2017-04-04静止眼动和动作表现关系的心理学机制天津体育学院学报(2016年3期)2016-12-18白内障术中局部注射麻醉导致的术后斜视及治疗中国卫生标准管理(2015年8期)2016-01-15下斜肌切断术与下斜肌转位术治疗V征斜视的效果比较中国当代医药(2015年29期)2015-03-01IMU/GPS测量误差对斜视条件下机载重轨干涉雷达学报(2014年4期)2014-04-23







