新能源场站中智能巡检机器人应用可行性分析
时间:2023-06-11 20:55:19 来源:雅意学习网 本文已影响 人 
喻洋 陆超 熊菲 晏志菁
(中国三峡新能源(集团)股份有限公司,四川成都 610041)
在国民经济水平的不断提高下,电网规模呈现出不断扩大的趋势,新能源场站投入量不断增加,导致人力资源越来越短缺,而自动化技术和人工智能技术的发展和普及有助于后期智能巡检机器人的研发和应用,不仅可以将人工生产方式转变为智能生产方式,还极大地提高了运维巡检效率。为了进一步提高新能源场站智能化管理水平,如何对智能巡检机器人进行应用可行性分析是技术人员必须思考和解决的问题。
智能巡检机器人在实际设计期间,通过采用搭建传感检测设备的方式对图像和红外带电进行系统化识别和检测,并利用自动化技术完成对变电站设备和周围环境的自动化巡检。现阶段,通过应用智能巡检机器人不仅确保设备外观巡视效率得以大幅度提升,还能实现对表计的智能化抄录,有效地保证气象数据采集的完整性和全面性[1],便于后期变电运维工作的有效开展。此外,巡检机器人在实际运行期间,经常用到的转向方式主要包含以下3种:(1)将8个驱动电机配置于机器人中,并利用4个轮转向功能,保证整个机器人转向的完整性和系统性。(2)将4个驱动电机配置于相应的机器人中,并采用左右两边驱动的方式确保整个机器人始终处于原地转向的状态。(3)机器人主要由以下两个部分组成,分别是驱动轮和万向轮。利用两个驱动轮之间所形成的速度差对整个机器人的运动转向状态进行统一处理。巡检机器人转向方式对比如表1所示。
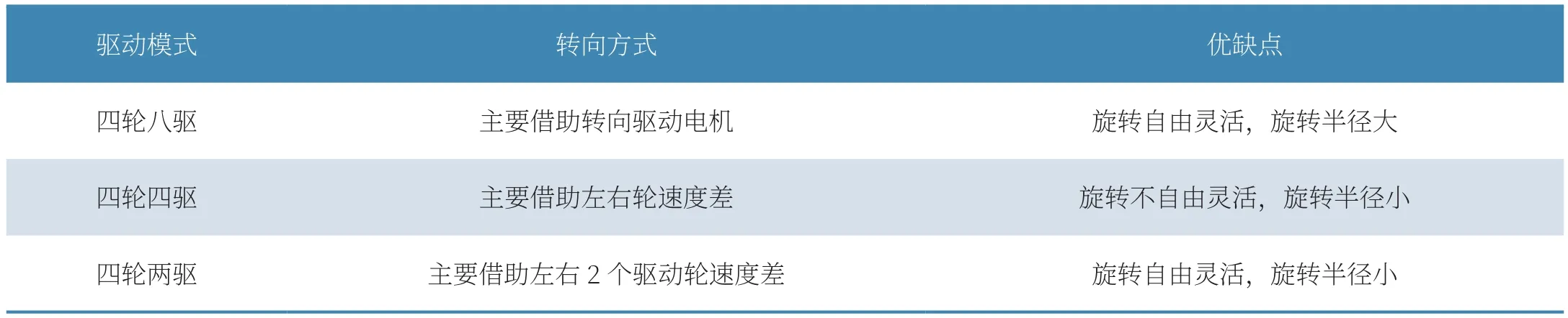
表1 巡检机器人转向方式对比
导航、定位是否精确直接影响了巡检机器人的自动化控制水平,巡检机器人一旦出现导航偏差问题,会自动偏离预设路径,从而引发严重的抛锚停机现象[2]。所以,要通过采用激光导航方式对智能巡检机器人的应用进行可行性分析,从而实现对巡检机器人运行性能的有效优化和完善。
2.1 激光传感器选择
在研发和设计巡检机器人期间,要优先选用3D激光传感器,尽可能避免环境因素对机器人的定位精确度产生不良影响。激光传感器作为一种重要的核心设备,主要用于对机器人地图和导航系统的创建和定位,以实现对传感器中心间距的精确化测量[3]。当传感器与外部环境进行交互期间,外部环境内部各种因素对传感器产生直接性的影响,确保传感器测距性能得以大幅度提升。现阶段,部分厂家巡检机器人在实际设计期间主要用到了2D激光传感器,该传感器主要起到了导航定位的作用,通过采用单线激光扫描的方式对水平面进行扫描处理,并进入二维定位环节中,实现对二维定位数据的全面化获取和整理,然后,利用相关算法完成对三维激光点云的计算,从而形成相应的三维空间数据。但是,机器人在实际运动期间无法确保机器人处于同一个水平面上[4],机器人的运动速度、轮胎磨损情况等参数的变化均会导致三维数据出现严重的混乱现象。通过利用3D激光传感器开展导航定位工作,可以获得相应的水平面二维数据,从而形成相应的三维空间数据,并借助三维数据特征进行定位操作。最后,还要采用三维定位功能[5]对三维空间数据进行系统化处理,即使机器人轮胎出现不同程度的磨损现象,整个环境也会出现不同程度的变化,可以利用后台算法开展相关补偿工作,从而更好地避免对巡检机器人导航定位功能产生不良的影响。目前,某省份通过构建500kV吴宁新能源场站,应用智能巡检机器人开展相应的试点应用工作,以最大限度地提高导航定位误差处理的科学性和合理性,将巡视任务设置为2项,采用重复导航定位方式对10个巡检点进行全面化检查,并对最终平均值进行误差分析[6],接着,采用巡检点定位的方式对巡检点位偏差进行系统化统计,发现与2D激光导航相比,3D激光导航具有较高的精确性和稳定性。激光导航稳定性测试如表2所示。
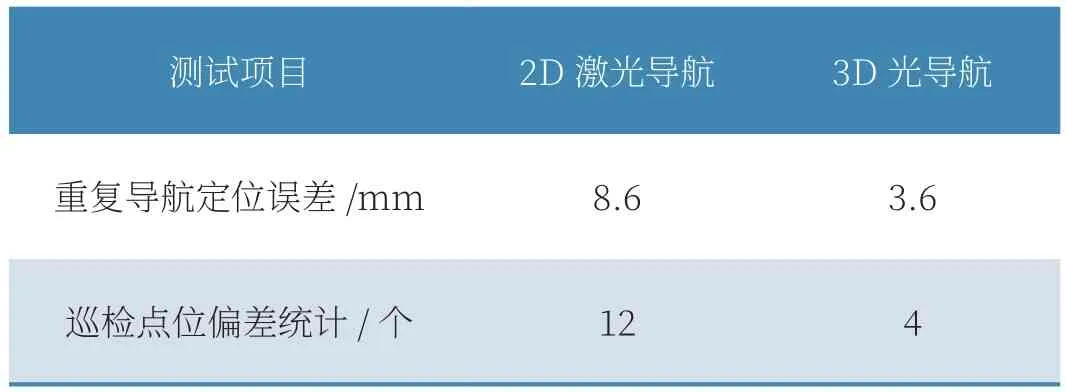
表2 激光导航稳定性测试
2.2 轮胎选择
现阶段,某检修分公司为了提高巡检效率,搭建和应用了43台智能巡检机器人,根据该机器人最终维保消缺记录情况将故障消缺次数设置为70次。根据巡检机器人轮胎问题将巡检脱轨和占总故障次数分别设置为14起、18.6%,巡检机器人故障原因统计分析如表3所示。
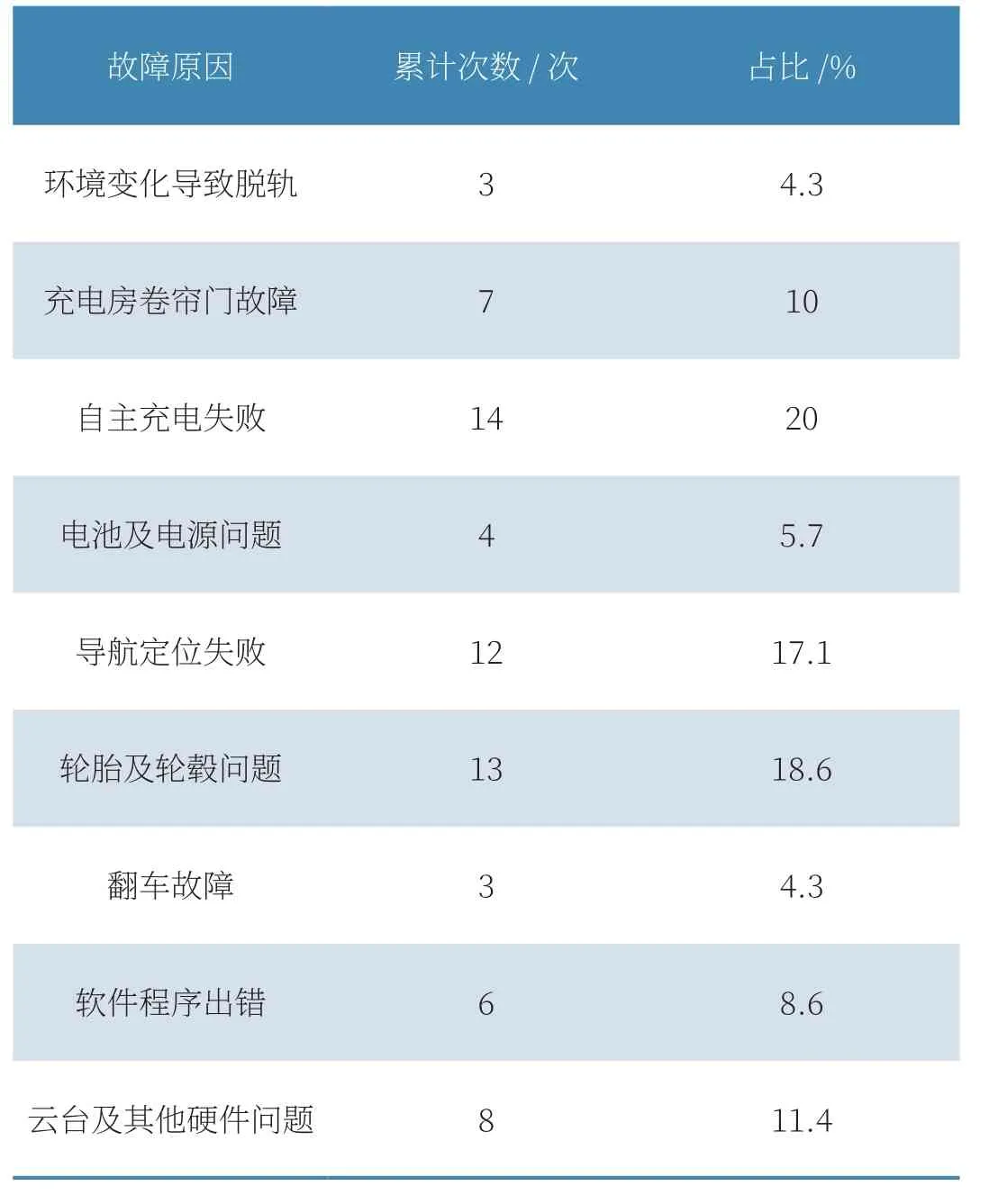
表3 巡检机器人故障原因统计分析
此外,在对巡检机器人硬件进行选型处理期间,需要在充分考虑轮胎故障信息的基础上优先选出实心轮胎,尽可能避免对充气轮胎的选用,如果选用了充气轮胎,一旦巡检机器人内部轮胎气压出现不同程度的变化,势必会造成机器人出轨[7]。在选用实心轮胎期间,需要定期观察巡检机器人轮胎磨损程度,避免引发充电失效、脱轨跌落等问题。
2.3 驱动方式选择
为了选出合适的巡检机器人驱动方式,现根据该机器人的实际使用情况对四轮四驱的方式应用效果进行分析,经过分析发现巡检机器人轮胎出现严重的磨损现象。就会出现不同程度的定位偏移。四轮四驱方式巡检机器人轮胎磨损情况如图1所示,从图1中可以看出,该轮胎磨损程度较高。所以,为了进一步提高巡检机器人设计水平,技术人员要优先选用四轮八驱的方式,并科学地构建和应用动力学控制模型[8],使巡检机器人运动控制性大幅度提升,从而实现对机器人轮胎的有效保护,使得机器人的运行性能得以显著提升。

图1 四轮四驱方式巡检机器人轮胎磨损情况
2.4 激光建图注意事项
对于巡检机器人而言,其地图数据主要是由多种类型的激光路标组成,单个路标主要由以下几个部分组成,分别是全局坐标系位置和激光测距数据。在构建巡检电子地图期间,需要根据所设置好的路标参数信息确定出相应的路标位置数据,为后期形成完整的电子地图打下坚实的基础。另外,在进行机器人激光建图期间,需要选用合适的路标参考物,同时,还要结合机器人的巡检路径规划情况,根据所设置好的设备构架、房屋等位置参数确保物体外观的美观性和固定性。
2.5 数据传输的安全性
目前,为了确保巡检机器人监控系统与移动巡检机器人之间能够建立起有效的连接,需要利用无线网桥基站,对巡检数据进行安全化传输,但是,部分机器人在选用无线网络期间使用了无线Wi-Fi网络,无法有效满足内网数据接入相关标准和要求。巡检机器人系统作为一种独立的系统,红外测温、表计识别等相关数据无法直接共享到生产管理系统中,严重影响了重要数据的互通和共享效果。部分国网公司在构建无线专网期间,需要根据机器人数据接入情况,利用加密芯片对无线专网传输数据进行传输和保存,同时,还要利用安全数据平台将相关数据直接接入相应的内网交换机中。目前,某省份500kV智能巡检机器人在实际应用中,已经成功连接于若干个客户终端设备,通过利用安全加密模块将新能源场站1.8G基站,向遥控射频信号发送相应的信号。同时,还要利用处理单元对信号进行解调处理,并确保安全数据接入平台与电力信息内网之间建立起有效的连接,解决Wi-Fi传输数据所造成的一系列的安全性问题。总之,为了确保智能巡检机器人发挥出更大的应用价值,技术人员 要尽可能提高该设备数据传输的可靠性和安全性。
在人工智能技术的不断发展下,机器人操作方式不断推广和普及,有效取代了人工处理方式,使得机器人逐渐发展为电网中的重要角色。但是,在现阶段中,智能巡检机器人在具体的应用中经常出现各种各样的软件问题和硬件问题,为此,技术人员要对智能巡检机器人的激光传感器、轮胎、驱动方式、激光建图注意事项、数据传输的安全性等进行应用可行性分析,确保巡检机器人更好地适应复杂环境,使其能够可靠、稳定、安全地运行,以保证新能源场站智能化运维的精确性、可靠性。
猜你喜欢 场站轮胎激光 天迈科技助力深圳东部公交场站标准化建设 打造场站新标杆城市公共交通(2022年6期)2022-08-22“新基建”背景下公交场站建设思路转变的思考城市公共交通(2022年1期)2022-04-07Er:YAG激光联合Nd:YAG激光在口腔临床医学中的应用昆明医科大学学报(2021年6期)2021-07-31激光诞生60周年科学(2020年5期)2020-11-26浅谈天然气场站设备及安全管理路径商品与质量(2019年51期)2019-11-28胖瘦自如的轮胎童话世界(2019年14期)2019-06-25请给激光点个赞小哥白尼(趣味科学)(2019年2期)2019-04-17“蜂窝”住进轮胎里知识就是力量(2018年3期)2018-03-08大轮胎,玩起来幼儿教育·父母孩子版(2017年12期)2018-02-28考虑武器配置的多场站多无人作战飞机协同路径规划方法军事运筹与系统工程(2018年2期)2018-02-16







