数据驱动的AUV,鱼雷攻击有效阵位自主决策方法
时间:2022-12-04 15:50:03 来源:雅意学习网 本文已影响 人 
郭力强,马 亮,张 会,杨 静
(海军潜艇学院,山东 青岛,266199)
以无人水下航行器(unmanned undersea vehicle,UUV)为代表的水下无人装备是未来海军装备体系中的重要组成部分,将对传统水下攻防作战模式带来巨大变革。军用方面,自主水下航行器 (autonomous undersea vehicle,AUV)可在己方兵力指挥控制或自主决策下,从预置武器发射舱上发射武器,对航道、港口和基地的敌方水面战斗舰艇、潜艇、军辅船等目标进行监视、跟踪和攻击[1]。典型代表有美国海军水下作战中心(Naval Undersea Warfare Center,NUWC)研制的“MANTA”大 型UUV 和俄罗斯北方机械制造厂研制的“波塞冬”超大型核动力UUV[2]。
有效阵位决策是指为保证鱼雷攻击效果,发射平台根据当前态势下目标弦角和射击距离等阵位参数,分析判断满足某一命中概率指标的阵位范围[3]。与潜艇、水面舰艇和飞机等有人平台相比,AUV 无指挥员参与,其有效阵位决策对装备的自主决策速度和武器攻击效果提出了更高需求[4]。
传统有效阵位决策主要通过模拟法[5-8],预估不同射击阵位上的鱼雷命中概率拟合成等概率射击圆,以此作为判断依据。然而,模拟法事先假定目标以等速直线机动,忽略了实际作战中目标运动要素测算误差和可能采取的机动规避防御方式,从而影响攻击效果。在声自导鱼雷对水面舰艇攻击问题的研究上,国内专家以声自导发现概率为优化目标,利用计算机仿真,提出了成熟的理论和方法[9-12]。但作战仿真受计算精度和算力的制约,难以满足AUV 短时间精准决策的双重需求。
机器学习[13]的发展为AUV 自主攻击决策技术的研究提供了新的思路,其基本思想是使用计算机实现算法,使得计算机能够学习数据、获得经验,并实现预测或得出结果。从机器学习的角度来看,有效阵位决策的本质是一种正负样本不平衡的二分类问题。近年来,以极限梯度提升树(extreme gradient boosting,XGB)为代表的集成学习算法[13-14],凭借在处理不平衡数据和特征提取中的出色性能,已经在医疗诊断[15-16]和故障检测[17]等重要领域的决策问题上得到应用,美国国防部在最新版《2017~2042 美国无人系统综合路线图》[18]中也将人工智能和机器学习作为提高无人系统自主性的首要支撑因素。因此,文中针对AUV 对鱼雷攻击效果和自主决策速度的更高要求,提出将作战仿真与集成学习相结合的自主决策方法,建立AUV发射声自导鱼雷攻击水面舰艇有效阵位决策模型,并对该模型的可行性和适用性进行分析和验证。
1.1 可调节系数的提前角计算方法
声自导鱼雷对水面舰艇的攻击过程[9]一般分为2 个阶段:一是声自导装置发现目标前为方向仪操纵的直航搜索段;二是发现目标后由声自导装置指令控制的声自导追踪段。在不考虑目标声磁干扰、反鱼雷武器杀伤等防御措施的前提下,声自导鱼雷能否命中目标关键在于声自导装置能否发现目标,其射击参数通常是由AUV 指控系统根据有利提前角原则[3]进行计算得到的。假设声自导装置的有效作用范围为一个扇面,可将扇面遮盖中心系数以常数k来表示近似求解提前角 φ。
如图1 所示,Vm为水面舰艇航速,Vw为声自导鱼雷航速,m为舰艇速度与鱼雷速度之比,D为鱼雷射击距离,Qm为攻击目标弦角,设定声自导作用距离r=kr0,则应满足声自导扇面前沿中点a与目标构成相遇条件,即∆aMC为相遇三角形,φ0为直航鱼雷的基本提前角,则
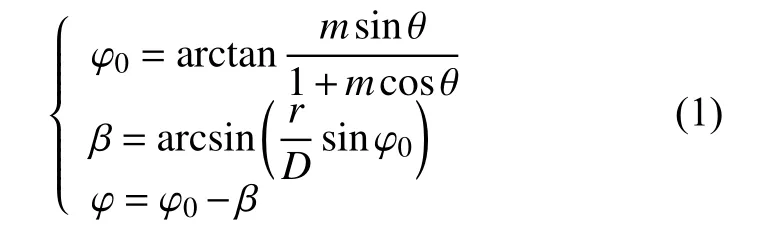

图1 可调节系数的提前角计算示意图Fig.1 Diagram of lead angle calculation by adjusted coefficient method
利用式(1),即可根据目标运动规律、相对态势以及鱼雷的声自导性能,近似计算提前角 φ和鱼雷航向Hw。
1.2 水面舰艇规避航向优化计算
在不使用反鱼雷武器的情况下,机动规避是水面舰艇对鱼雷防御的基础和前提。在收到鱼雷报警后,为了尽可能远离声自导鱼雷自导作用区域,使最小安全规避预警距离[19]最大,可采取全速转向至距离来袭鱼雷最小距离最大航向的动态规避策略[20]。如图2 所示,以水面舰艇转向点为起点作鱼雷航速Vw反向量QO,以O点为圆心,以水面舰艇速度Vm大小为半径作圆周,则过Q点作水面舰艇速度圆的走出方向一侧的切线,对应的方向OS即为最小距离走出航向。通过仿真水面舰艇机动规避鱼雷过程,遍历规避航向的方法,计算水面舰艇机动规避过程中取得最小距离最大值对应的航向即为最优规避航向optHm。

图2 水面舰艇规避航向优化计算示意图Fig.2 Diagram of optimization calculation for surface ship evasive course
1.3 声自导鱼雷发现目标概率作战仿真优化
由于实际作战中测算的目标运动要素存在误差,可应用蒙特卡洛法统计计算发现概率[3],即声自导鱼雷发现目标概率P为:在一定目标散布条件下,发现目标次数M与总攻击次数N之比。设仿真起点为声自导鱼雷发射时刻,定义k系数的取值范围为[0,kr],水面舰艇规避航向遍历范围为[0,Hr],目标运动要素误差服从高斯正态分布,计算目标散布和机动规避条件下声自导鱼雷攻击水面舰艇的最大发现概率Pmax。Pmax计算流程如图3 所示,具体方法与步骤如下。
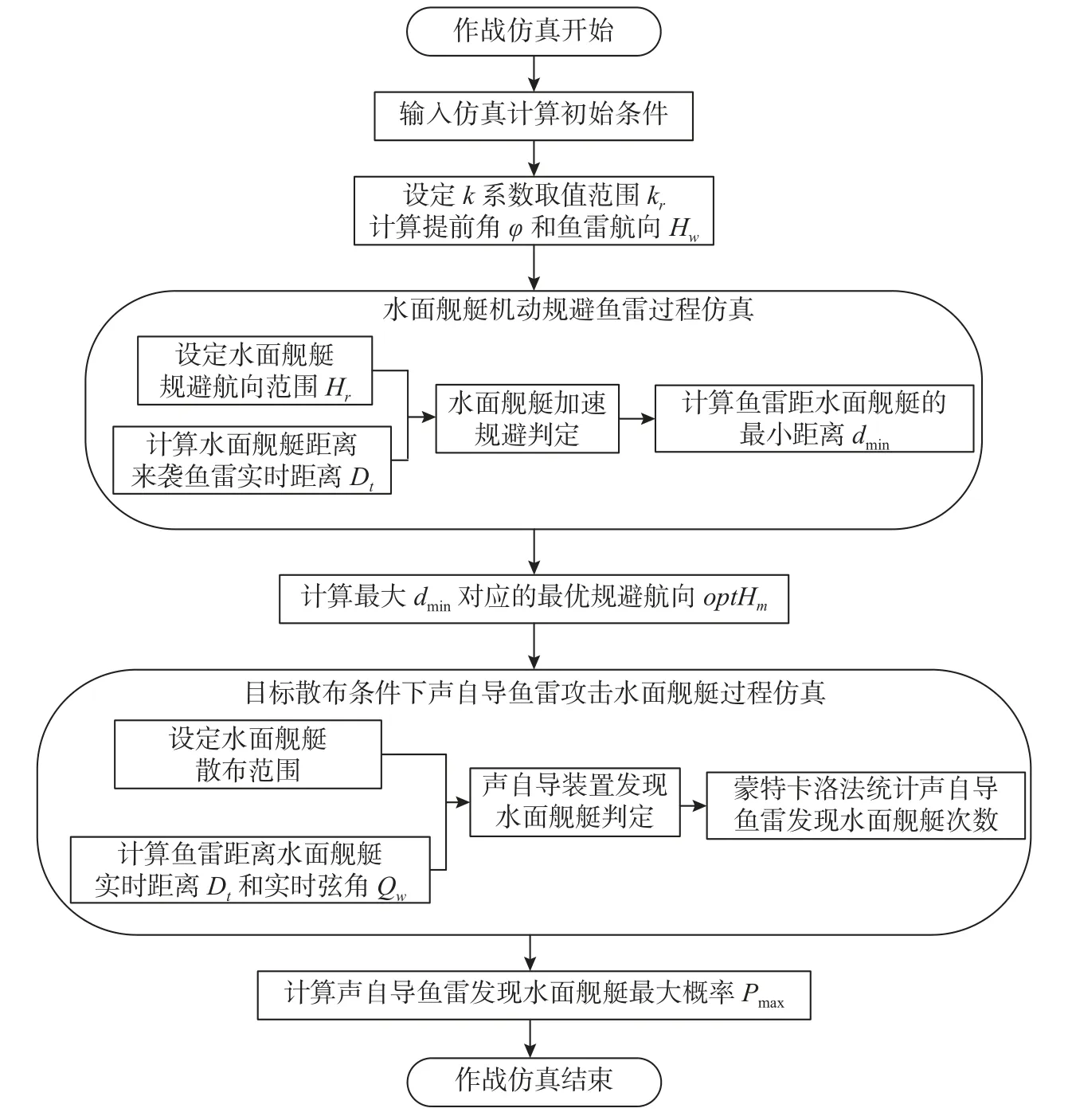
图3 发现概率优化计算模型流程图Fig.3 Flow chart of detective probability optimization calculation model
1) 输入仿真计算的初始条件。水面舰艇初始相对方位横坐标为x0,纵坐标为y0,初始航速为Vm0,加速后航速为Vm1,初始航向为Hm0,转向半径为R,转向角速度为θ,声呐预警距离为dship,探测扇面角为2λship;鱼雷航速为Vw,有效航程为L,射击距离为D,攻击目标舷角为Qm,声自导作用距离为dtorp,声自导扇面开角为2λtorp;目标位置误差系数为 σxy,目标航速误差系数为σVm,目标方位误差系数为σHm,作战仿真总次数为Nr,仿真步长为 ∆T,仿真步数n=L∆T/Vw。
2) 设定k系数取值范围[0,kr],按照式(1)计算对应的提前角 φ和鱼雷航向Hw。
3) 按照时间步进的方式仿真水面舰艇规避鱼雷机动过程,计算声自导鱼雷与水面舰艇之间的实时距离Dt和鱼雷实时弦角Qw。实时判定Dt与dship的关系,当Dt≤dship时,水面舰艇加速至Vm1,并以航向Hm开始机动规避。
4) 设定水面舰艇规避航向遍历范围[0,Hr],计算不同规避航向下水面舰艇距来袭鱼雷的最小距离Dmin最大值,得到最优规避航向optHm。
5) 仿真目标散布条件下声自导鱼雷攻击水面舰艇过程,设定目标散布范围,实时判定Dt与dtorp、Qw与λtorp之间的关系。若在鱼雷有效航程L可达的前提下,计算结果同时满足Dt≤dtorp和Qw≤λtorp,则判定鱼雷声自导装置发现水面舰艇;若鱼雷有效航程L结束仍不满足发现条件,则判定声自导鱼雷未发现水面舰艇。
6) 在1 次作战仿真过程中,若判定声自导鱼雷发现水面舰艇,则M自增1,否则自增0。作战仿真循环Nr次后,统计计算声自导鱼雷攻击水面舰艇的最高发现概率Pmax。
实验在Windows 环境下进行,使用MATLAB R2021b,JupyterLab 3.10 IDE 和Python 3 Kernel。硬件配置为AMD Ryzen 5-5600H 处理器,主频3.30 GHz,内存16 GB。
2.1 有效阵位判断阈值
将仿真战场态势参数输入上述模型,生成基础实验数据集。通过设置声自导鱼雷发现概率判断阈值,将超过阈值条件的阵位作为有效阵位[3],进而将AUV 有效阵位决策问题转换为二元分类问题。
有效阵位判断阈值由指挥员根据具体作战任务进行设置。如任务的首要前提是保证攻击效果,则阈值应提高到80%甚至更高;若态势判定AUV 可能已经暴露,则阈值仅为60%左右也应进行攻击,以优先保证生存。文中实验初始设置阈值为70%。将基础实验数据集标签进行二值化处理,特征矩阵进行标准化和方差过滤后,形成分类实验数据集的具体信息如表1 所示,可见样本数据具有明显的不均衡特点。
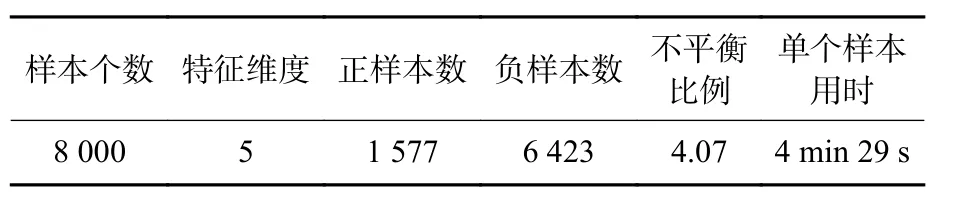
表1 分类实验数据集信息Table 1 Information of categorized experimental data sets
2.2 评价指标
在不均衡数据的分类中,仅适用单一的准确率(accuracy)和召回率(recall)指标是不全面的。因此,加入曲线下面积(area under the curve,AUC)来共同评价模型的性能。AUC 综合考虑少数类和多数类分类的准确性,表2 的混淆矩阵可以直观地表示出各种分类情况。
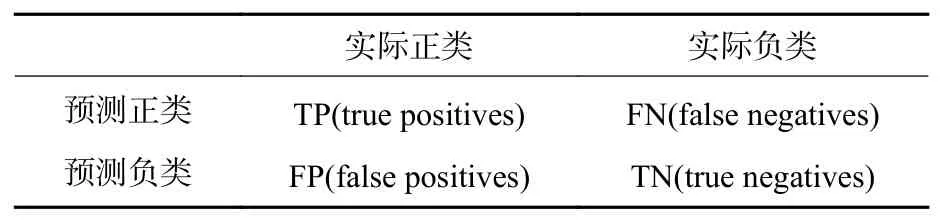
表2 混淆矩阵Table 2 Confusion matrix
AUC 是接收者操作特性曲线(receiver operating characteristic curve,ROC)下的面积,取值为0~1[21]。精确率(precision)、召回率(recall)、F1 值和AUC 等指标的计算公式如下:
式中:NP为正类样本(少数类)总数;NN为负类样本(多数类)总数;i为正类样本;ranki为正类样本的置信度排序。考虑到水下作战以保证隐蔽性为前提,选择AUC作为模型决策性能的评价指标。
2.3 实验设计与结果
为检验集成算法在处理不平衡分类问题的优势,使用传统的强分类器支持向量机(support vector machine,SVM)与随机森林(random forest,RF)和XGB 2 种典型集成学习算法进行比较,具体建模流程如图4 所示。

图4 有效阵位决策模型流程图Fig.4 Flow chart of the effective position decision-making model
随机划分训练集和测试集后,以AUC 值作为评估指标,采用5 折交叉验证取均值、人工学习曲线和调用Optuna[22]框架的方法对3 种模型进行参数优化。3 种模型的最终分类准确率为93.7%,95.9%和96.5%,决策用时分别为19.36,0.87 和1.58 s。表3 和图5 的结果显示:实验中,使用XGB模型得到的F1 值和AUC 面积最高,分别达到91.1%和0.994;RF 模型的决策速度最快,仅为0.87 s,能够满足AUV 有效阵位决策的要求。

表3 3 种模型分类性能Table 3 Classification performance of three models

图5 3 种机器学习模型ROC 曲线Fig.5 Receiver operating characteristic curves of three machine learning models
3.1 多种任务阈值的适应能力
为检验集成算法在多种任务阈值下的分类效果。将阈值调整为60%,65%,70%,75%和80%后的实验数据集输入模型,分类结果如表4 所示。分析可知,随着阈值的增大,实验数据集样本不平衡比例不断增加,那么提升决策精度的关键在于分类算法处理不平衡数据的能力。由于集成学习采取多个分类器迭代训练取优的方式,加入正则项和剪枝操作有效控制自身复杂度,修正传统分类算法容易过拟合的缺陷,并预设调节正负样本不平衡度的超参数,通过过采样的方法,在训练中赋予少数类更高的权重,从而在处理不平衡二分类问题上比SVM 精度高、速度快,在多种任务阈值下具有较高的适应能力。

表4 不同阈值下模型决策性能比较Table 4 Comparison of model decision performance under different thresholds
3.2 复杂海洋环境下的泛化能力
进一步检验有效阵位决策模型在复杂海洋环境下的泛化能力,调整作战仿真参数声呐预警距离dship,声自导作用距离dtorp和目标方位误差系数σxy如表5 所示,模拟作战海域变化对声呐设备观测精度的干扰,并将其生成的实验数据作为检验模型泛化能力的测试集。
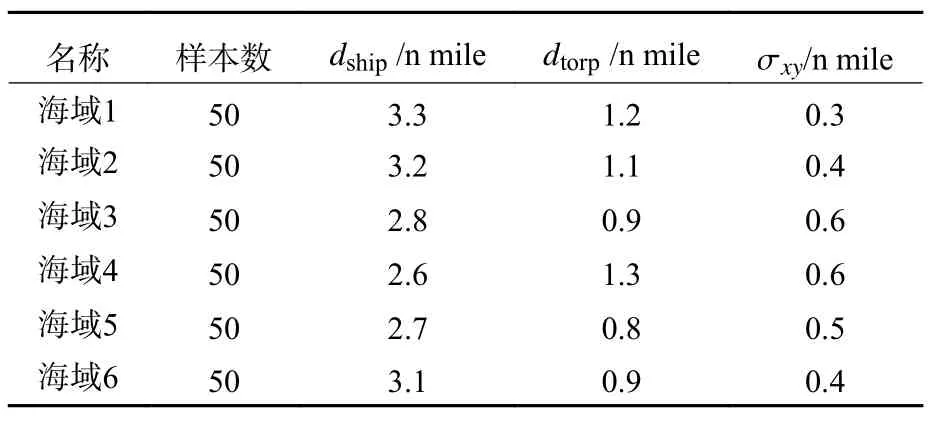
表5 作战仿真参数调整Table 5 Adjustment of operational simulation parameters
观察图6 可知,当模拟作战海域发生变化时,衡量模型决策性能的AUC 值能够保持在0.924 以上的较高范围,说明模型在复杂海洋环境下具备一定的泛化能力。图7 为XGB 训练过程特征贡献度排序,得分越大表示特征对分类结果贡献越大。观察可知,鱼雷攻击目标舷角Qm,舰艇初始航向Hm0和鱼雷射击距离D3 个特征对决策精度的影响最大,进而从特征选择的维度解释了模型保持较高精度的原因。

图6 模型在不同作战海域的决策效果Fig.6 Decision-making effect of the model in different operational sea areas

图7 模型特征贡献度排序Fig.7 Contribution ranking of the features in model
针对AUV 的特点和装备发展需求,在传统有效阵位决策研究基础上,以提升攻击效果和决策速度为目的,提出将作战仿真与机器学习算法相结合的建模方法。实验结果表明,以数据驱动代替仿真驱动的方法,能够在保证攻击效果的前提下,大幅加快有效阵位决策速度。决策模型在多种任务阈值和复杂海洋环境下具有较好的适应能力和泛化能力,能够从一定程度上改善作战仿真决策时间长,无法动态调整的问题。考虑到真实水下战场干扰和对抗强度更大,态势数据的获取面临误差大、实时性弱的困难,下一步将探索引入时序数据处理方法,对观测的不完全时序数据进行分析、纠错和补全,为提高决策模型的鲁棒性提供支持。
猜你喜欢 水面舰艇航向鱼雷 基于事件触发的船舶航向逻辑切换自适应控制舰船科学技术(2022年11期)2022-07-15风浪干扰条件下舰船航向保持非线性控制系统舰船科学技术(2022年10期)2022-06-17水面舰艇与反潜巡逻机协同检查搜潜队形配置研究指挥控制与仿真(2022年2期)2022-04-21鱼雷:貌不惊人,却威力巨大少儿科技(2021年4期)2021-01-11水下的暗战(一)兵器知识(2020年2期)2020-03-20用“国家使命”导引航向——大学之大,重在推进产学研深度融合和科技成果转化当代陕西(2019年17期)2019-10-08重型鱼雷研发有多难文萃报·周二版(2019年46期)2019-09-10消除大班额的正确“航向”师道(2018年6期)2018-07-16水面舰艇作战系统的技术及应用电子技术与软件工程(2018年7期)2018-02-25水面舰艇齐射反舰导弹兵器知识(2017年10期)2017-10-19







