铁路集装箱成件包装货物智能装卸系统设计
时间:2023-06-17 09:15:04 来源:雅意学习网 本文已影响 人 
汪正义,刘 飞,赵有国,马玉坤
(1.中国铁道科学研究院集团有限公司运输及经济研究所,北京 100081;
2.中国铁路沈阳局集团有限公司货运部,辽宁 沈阳 110000)
目前我国铁路运输粮食、化肥等成件包装货物仍以铁路棚车为主,在运输、仓储等物流环节中需要对货物进行多次倒装作业。与国外发达国家相比,我国铁路成件包装货物装卸机械有着较大差距,存在设备适应性差、自动化及智能化程度低等问题,需要配备一定数量的人工进行装卸。装卸人员需要克服作业环境恶劣、劳动强度大且高重复性的作业条件,导致年轻人员从业意愿低、招工困难,作业人员老龄化严重,尤其是铁路货运人员,平均年龄达45 岁,每年净流失4 000 人,人力资源不足。倒装作业存在作业方式落后、作业效率低下、人工成本高、货损货差等问题,影响着铁路运力的进一步释放和货运服务质量的提升[1]。集装箱运输是打通全程运输各环节、提高装运效率、解决“最后一公里”问题的有效手段。相比采用棚车装运成件包装货物,集装箱装运成件包装货物可以有效避免多次倒装,减少货损货差,更有利于机械化、智能化装卸作业,提升车辆运转效率[2]。因此,研究铁路集装箱成件包装货物智能装卸系统(以下简称“智能装卸系统”),不仅可以提升装卸作业效率,还可以扩大进箱货物品类,对集装箱运输发展具有重要意义。
1.1 设计目标
智能装卸系统适用于装卸集装箱内成件包装货物,用于具有集装箱作业的货运站、物流园区、集装箱中心站、专用线及企业作业场。结合常用的皮带传输装置,可以实现成件包装货物由汽车、堆场和库房等装至集装箱内,也可以由集装箱内卸至汽车、堆场和库房内。智能装卸系统需要达到以下设计目标。
(1)安全。暴露在外的运动构件需要配以防护网,容易造成人身伤害的部位需要配备安全联锁装置或实施远距离操纵。电气元件、导线的规格和安装需要符合安全标准。另外,为了保护设备,还应设置保险销、安全阀等过载保护装置以及红灯、警铃等警示装置。
(2)可靠。在预定的使用期限内不发生或极少发生故障。大修或更换易损件的周期不宜太短,以免经常停机影响生产。
(3)适用范围广。智能装卸系统主要应用于集装箱成件包装货物装卸,需要进入集装箱内工作,因而其外形尺寸、作业环境温度、设备最大允许质量及走行轮压需要满足集装箱相关要求。此外,其工作对象应包括常见的袋装、箱装成件包装货物[3]。
1.2 设计要求
智能装卸系统需要对集装箱内的成件包装货物进行装卸作业,根据其工作场景以及工作对象,分析设计要求。
(1)智能装卸系统作业效率。智能装卸系统主要是为了实现成件包装货物在集装箱与汽车、堆场、库房内的装卸,为了满足现场作业要求,提升作业效率,因此设定智能装卸系统在连续作业时,平均5 s完成1件成件包装货物的装卸。
(2)智能装卸系统最大外形尺寸。智能装卸系统与集装箱规格和货物规格密切相关,其中铁路通用集装箱为ISO 标准20 ft 和40 ft。集装箱门开口、内宽尺寸与智能装卸系统总体方案密切相关,根据集装箱尺寸[4],智能装卸系统最大高度不超过2 350 mm,最大宽度不超过2 330 mm。
(3)成件包装货物最大允许尺寸及质量。铁路成件包装货物品类繁多,但包装形式大致可以分为软包装、半硬包装及硬包装,主要以袋装和箱装为主。根据《粮食销售包装》和《水泥包装袋》可知[5-6],袋装货物最大质量不超过50 kg,长度一般不大于800 mm。箱装货物尺寸种类繁多,分邮政标准纸箱和企业自备纸箱,企业自备纸箱一般由生产企业根据货物形状自行设计。按照《机械设计手册》第42 篇“造型设计”和人机工程中人的肌体用力限度可知,手的拉力不超过567 N、提力不超过400 N(从地面算起高度0.8 m),考虑到单人连续装卸,预计箱装货物质量不超过50 kg,长度不超过800 mm。由此可知,智能装卸系统应满足质量不超过50 kg、最大长度不超过800 mm的成件包装货物装卸。
(4)智能装卸系统作业环境温度。按照《铁道货车通用技术条件》3.1 条款可知,货车应能适应-40 ℃~+40 ℃运用环境温度。集装箱装卸作业环境与货车运用环境条件一致,装卸作业环境不应小于该范围,考虑到更大范围的适用性,智能装卸系统设定允许作业环境温度为-40 ℃~+80 ℃。
(5)设备最大允许质量及走行轮压限制。智能装卸系统需要在集装箱内部行驶,集装箱箱底需要承受设备产生的集中载荷,为保证装卸作业后集装箱底部的完整性,需要对设备自重或者载重进行限定。按照《系列1集装箱技术要求和试验方法第一部分:通用集装箱》中对集装箱底部强度试验要求可知[7],使用1辆轮胎式试验车辆进行试验,后轴负荷为5 460 kg,每个车轮与箱底面的接触点应在185 mm×100 mm所形成的矩形范围内,每个车辆与底板的接触面积不得超过142 cm2,轮胎宽度为180 mm,轮距为760 mm。因此可知,智能装卸系统走行机构为两轴设计时,单轴质量不得超过5 460 kg,轮距不小于760 mm,轮胎宽度不小于180 mm,轮胎与底板接触面积不得小于142 cm2。
综上所述,智能装卸系统具体技术目标设计要求如表1所示。

表1 智能装卸系统具体技术目标设计要求Tab.1 Design requirements for specific technical objectives of intelligent handling system
2.1 总体方案
智能装卸系统由人工辅助操控,通过机械臂及夹持装置,配合皮带机完成成件包装货物的堆码、卸货工作[8]。总体方案系统主要由机械主体结构、机械臂、末端执行机构(夹持装置)、传输装置、人工辅助操作台和控制系统组成,可以按不同的物料包装、质量、工序、装卸要求进行参数设置,实现成件包装货物的码垛、拆垛装卸作业。智能装卸系统总体方案示意图如图1所示。

图1 智能装卸系统总体方案示意图Fig.1 General scheme of intelligent handling system
2.2 组成部分
(1)机械结构主体。机械结构主体为传输装置的支撑件,同时也为机械臂及夹持装置的基座。通过对机械主体结构的合理设计,可以将传输装置、气动源元件、驱动电机等设计为机械臂基座的一部分。利用主体结构上部框架结构的移动,可以有效缩短机械臂长度、降低机械臂自重、提高机械臂承载,实现机械臂的高负载/自重比。
(2)机械臂。码、拆垛机械臂以人的手臂为原型进行仿生设计[9],主要包括机械臂本体结构和控制柜,通过预设好的路径对箱装货物进行抓取、搬运、装配等操作,通过人机交互系统,由工作人员实时操控对袋装货物进行抓取、搬运、装配等操作。机械臂的设计则采用CAD 和FEM 有限元技术进行结构上的优化,使其具有比较强的抗震能力和机械性能。采用基于PC 的开放式控制系统,更有利于机械臂运行平稳、快速和准确。
(3)夹持装置。集装箱装卸环境下,夹持装置以侧面或顶面抓取的方式进行成件包装货物装卸[10]。大部分铁路运输成件包装货物为袋装或箱装,在实际装卸过程中,无法依靠一种夹持装置完成所有工作,因而,应设计合适的夹持装置,最大化满足装卸需求。相比机械式夹持装置,吸附式夹持装置除了能实现机械式夹持装置的码垛功能外,还具有拆垛功能,而且更能适应多形状包装[11]。为最大化满足装卸需求,夹持装置采用吸附式[12]。考虑到成件包装货物中袋装货物具有变形量大、规格不一的特点,将夹持装置设计为多吸盘分散式结构,以增加成件包装货物规格的适应性。
(4)传输装置与人工辅助操作台。传输装置采用传统的皮带机结构,根据装卸工况,可以与其他传输机构配合使用。人工辅助操作台主要用于袋装货物的装卸,通过人机交互系统,采用人工辅助方式,实现对货物的自动吸附、起升、搬运和释放,完成货物的码垛及卸垛作业。
(5)控制系统。控制系统主要由主控制器、从控制器和用户终端等组成,主控制器与从控制器之间采用实时通信,主要控制智能装卸系统的运动状态以及夹持装置的动作[13]。
夹持装置作为智能装卸系统最重要的执行“元件”,无论是装箱还是卸箱作业,夹持装置所需要的动作是一样的,通过对货物吸附—起升—搬运—释放动作的不断循环,完成装、卸箱作业。
3.1 功能原理
根据夹持装置的动作要求,设计气动系统原理图如图2所示,气动系统元器件明细如表2所示。在真空回路中,真空减压阀用于将起源的压力降到较低的稳定值向系统供气(由于减压阀处于真空管路中,因而使用真空减压阀)。真空泵处于工作状态时,利用机械臂将真空吸盘移至货物上方,通过电磁阀将真空吸盘与真空泵回路联通,当真空压力达到真空开关设定压力时,开关处于接通状态,发出电信号指挥真空吸附夹持结构及机械臂执行下一步动作。1 个真空吸盘配置1 个止回阀,止回阀可以防止未接触货物的吸盘或者突然脱离货物的吸盘对其他真空吸盘造成影响,能有效降低真空管路泄漏量,确保吸盘正常工作,并且内置滤网,能够有效保持真空回路的空气清洁度。将货物移动至相应位置后,通过操作电磁阀,将真空泵与吸盘回路断开,吸盘内的真空状态失效,使货物脱离吸盘。

图2 气动系统原理图Fig.2 Principle of pneumatic system

表2 气动系统元器件明细Tab.2 Details of components of pneumatic system
3.2 真空吸盘及吸附所需真空度
真空吸盘是真空系统中的执行元件,考虑到货物表面不平整、弯曲和倾斜,同时在吸附货物的过程中有较好的缓冲性能,宜选用波纹型(风琴型)吸盘。吸盘的理论吸吊力是吸盘内的真空度p与吸盘的有效吸着面积A的乘积,吸盘的实际吸吊力除了应考虑被吸吊工件的质量及搬运过程中的运动加速度外,还应给予足够的余量(安全系数),以保证吸吊的安全。装卸、搬运过程中的加速度应考虑启动加速度、停止加速度、平移加速度和转动加速度(包括摇晃)。
针对面积大的吸吊物、重的吸吊物、有振动的吸吊物或要求快速搬动的吸吊物,为防止吸吊物脱落,通常使用多个吸盘进行吸吊,这些吸盘应合理配置,以使吸吊合力作用点与被吸吊物的中心尽量靠近。
由上述气动系统描述可知,采用n个同一直径D的吸盘吸附物体,则吸附所需真空度可以按下式选定。

式中:p为吸盘真空度,MPa;
W为吸吊物的重力,N;
ns为安全系数;
D为吸盘直径,mm;
n为吸盘数量,个。
当安全系数取为4,吸盘数量为6 个,吸吊物重为500 N,预选吸盘直径为80 mm,则吸吊所需真空度计算结果为0.066 MPa。选用真空度为92%的真空泵可以满足使用要求。夹持装置示意图如图3所示。
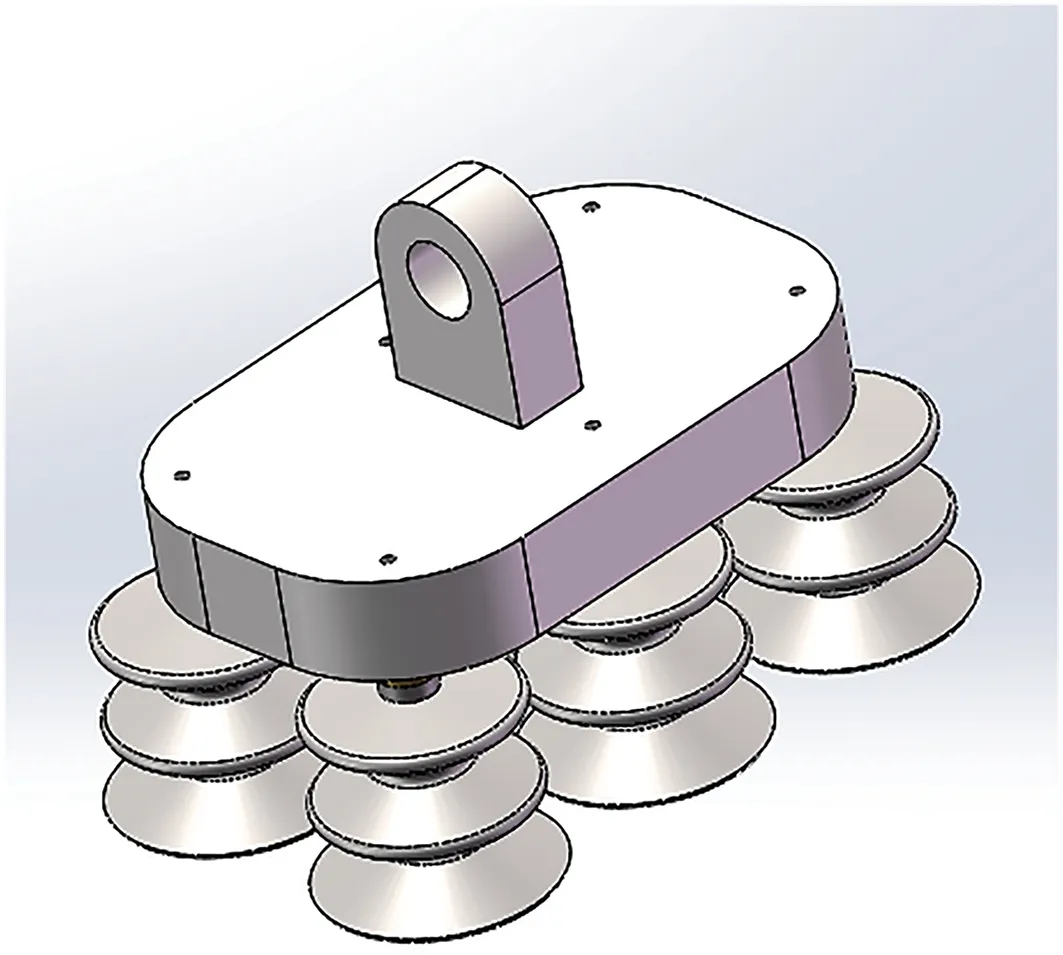
图3 夹持装置示意图Fig.3 Clamping device
3.3 气动元件计算和选型
(1)真空泵。真空泵除了真空度需要满足要求外,还需要考虑抽气速率和真空度响应时间,可以根据以下公式进行计算。
式中:S为真空泵抽气速率,L/s;
V为真空室容积,L;
t为达到真空度所需时间,s;
p1为初始压强,Pa;
p2为要求压强,Pa。
考虑成件包装货物装卸效率,将响应时间设置为1 s,真空室容积主要影响因素为真空吸盘体积,另外考虑管路体积,粗略估计为0.02 L,初始压强为101 kPa,要求压强为66 kPa,则真空泵抽气速率计算结果为0.008 5 L/s。在不考虑空气泄露的情况下,抽吸速率大于31 m3/h 的真空泵即可满足要求。考虑到可能的空气泄露和更高的作业效率,选取抽吸速率为67 m3/h的真空泵。
(2)真空电磁换向阀。真空电磁换向阀联通管路中的压力低于大气压,最基本的要求是保证连接的高度密封性,按照空气压力可以分为低、中、高、超高真空换向阀。真空电磁阀通过交流或者直流电源来启闭,利用电磁原理,实现对管路的真空处理,可以用于真空管路联动控制系统中。在夹持装置真空回路中,通过对电磁铁进行操作,可以控制阀门启闭实现接通或者断开真空压力源,选择使用二位三通阀。同时换向阀的流速和压力范围也不得低于真空回路所设指标,流速需要大于67 m3/h,工作压强需要不小于101 kPa。
(3)真空减压阀。真空减压阀通过控制阀体内的启闭件的开度来调节空气的流量,将真空度降低,同时借助阀后压力的作用调节启闭件的开度,使阀后压力保持在一定范围内,从而使得在进口压力不断变化的情况下,保持出口压力在一个比较小的范围内波动。就夹持装置回路来看,通过减压阀的设定,可以将减压阀至吸盘回路中的压强值控制在一定范围内,增加回路稳定性,降低高真空度对吸附货物的破坏。
铁路成件包装货物集装箱智能装卸系统集机械、电子、控制与计算机技术于一体,以自动化、智能化设备作业来替代装卸作业中的人工作业,实现铁路成件包装货物智能化装卸,有效减少劳动力数量,降低人力成本,提高装卸效率,同时能够有效解决铁路货运人员老龄化加剧、装卸劳力不足且不断流失等问题。配以科学合理的成件包装货物集装箱装卸工艺,在进一步提升装卸作业效率的基础上,可以扩大进箱货物品类,为集装箱运输发展提供技术支持,提高成件包装货物的运输服务质量,有利于进一步释放铁路多式联运红利,推动铁路运输供给侧结构性改革和铁路货运高质量发展。
猜你喜欢 真空度真空集装箱 《真空与低温》征稿说明真空与低温(2022年6期)2023-01-06虚实之间——集装箱衍生出的空间折叠现代装饰(2019年7期)2019-07-25挤奶机集乳器真空度评估研究中国奶牛(2019年1期)2019-02-15EVOLO真空胎专用转换组和真空气密胎垫中国自行车(2018年7期)2018-08-14我家住在集装箱中国公路(2017年8期)2017-07-21挤奶机真空度对牛奶体细胞数和牛乳头末端壁厚的影响农业工程学报(2017年9期)2017-06-27一种抽真空密炼机橡胶工业(2015年6期)2015-07-29一种新型自卸式污泥集装箱罐专用汽车(2015年2期)2015-03-01罕见病的“政策真空”中国卫生(2014年11期)2014-11-12乙醇减压提取工艺中真空度影响因素研究中成药(2014年2期)2014-11-04







